SERJE TA' GRIPPER ELETTRIKU HITBOT – Gripper Elettriku Parallel Z-EFG-20


Kategorija Prinċipali
Driegħ robotiku industrijali / Driegħ robotiku kollaborattiv / Gripper elettriku / Attwatur intelliġenti / Soluzzjonijiet ta' awtomazzjoni
Applikazzjoni
Il-grippers tar-robot tas-serje SCIC Z-EFG huma ta’ daqs żgħir b’sistema servo integrata, li tagħmilha possibbli li jinkiseb kontroll preċiż tal-veloċità, il-pożizzjoni, u l-forza tal-ikklampjar. Is-sistema ta’ qbid avvanzata ta’ SCIC għal soluzzjonijiet ta’ awtomazzjoni tippermettilek tiftaħ possibbiltajiet ġodda għall-awtomazzjoni ta’ kompiti li qatt ma ħsibt possibbli.

Karatteristika

·Kontrollur integrat
·Puplesija u forza tal-qbid aġġustabbli
· It-tarf jista' jiġi mibdul biex jadatta għal diversi bżonnijiet
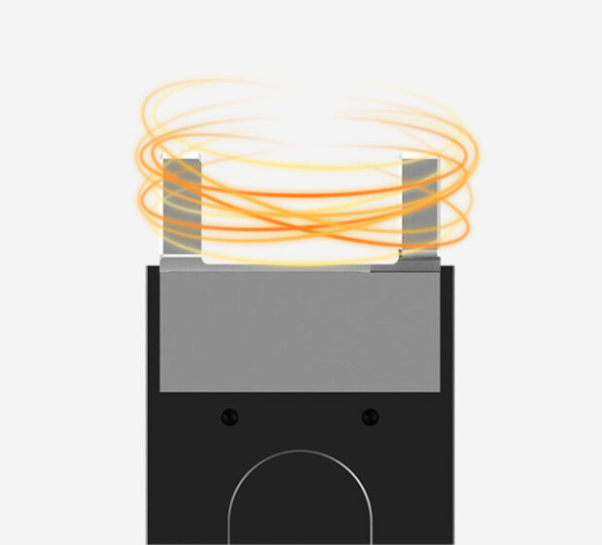
·Iġbor oġġetti fraġli u deformabbli bħal bajd,tubi tat-test, ċrieki, eċċ.
·Applika għal xeni mingħajr sors ta' arja (eż. laboratorju, sptar)
Preċiżjoni fil-Kontroll, biex Tikklampja fi Spazju Żgħir Veloċi u Stabbli biex Tikklampja
Forza Kbira ta' Ikklampjar
Il-puplesija totali hija ta' 20mm, il-forza tal-ikklampjar hija ta' 80N.
Preċiżjoni għall-Kontroll
Ripetibbiltà: ±0.02mm
Ħajja Twila
Għexieren ta' miljuni ta' ċikli, lil hinn mill-gripper tal-arja
Il-kontrollur huwa integrat
Okkupazzjoni żgħira ta' spazju, konvenjenti biex tintegra.
Modalità ta' Kontroll
Kontrolluri tal-polz, I/O għall-għażla
Ikklampjar Artab
Jista' jikklampja oġġetti fraġli




Parametru tal-Ispeċifikazzjoni
| Numru tal-Mudell Z-EFG-20 | Parametri |
| Total puplesija | 20mm |
| Forza tal-qabda | 30~80N |
| Ripetibbiltà | ±0.02mm |
| Piż tal-qabda rakkomandat | 0.8kg |
| Trażmissjoni modalità | Rack tal-gerijiet + Gwida tar-romblu trasversali |
| Riforniment tal-griż tal-komponenti li jiċċaqalqu | Kull sitt xhur jew miljun moviment / ħin |
| Ħin tal-moviment tal-puplesija f'direzzjoni waħda | 0.45sekondi |
| Firxa tat-temperatura operattiva | 5-55℃ |
| Firxa ta' umdità operattiva | RH35-80(Ebda ġlata) |
| Modalità ta' moviment | Żewġ swaba’ jiċċaqalqu orizzontalment |
| Kontroll tal-puplesija | Aġġustabbli |
| Aġġustament tal-forza tal-ikklampjar | Aġġustabbli |
| Piż | 0.458kg |
| Dimensjonijiet(T*W*Għ) | 44 * 30 * 124.7mm |
| Tqegħid tal-kontrollur | Mibni fil- |
| Qawwa | 5W |
| Tip ta' mutur | DC mingħajr brushes |
| Kurrent Peak | 1A |
| Vultaġġ nominali | 24V |
| Kurrent ta' standby | 0.2A |
| Reżistenti għall-impatt / reżistenti għall-vibrazzjoni | 98m/s |
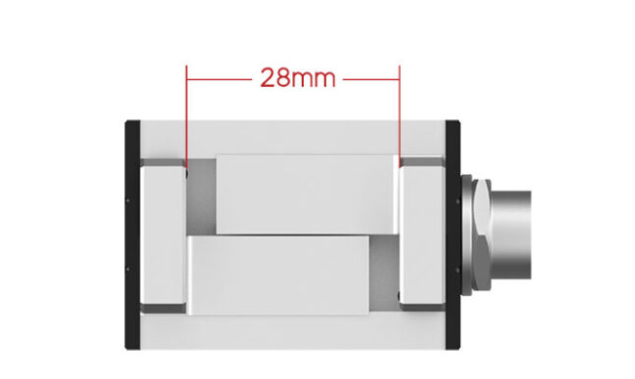
| Dijametru tal-mutur | 28mm |
* Forza tal-qbid ta' Z-EFG-20: Il-forza tal-qbid tista' tiġi aġġustata billi jiżdied materjal ta' deformazzjoni kkontrollata man-naħa ta' quddiem tal-apparat, li jinkiseb skont il-kurva korrispondenti tad-deformazzjoni u l-forza.
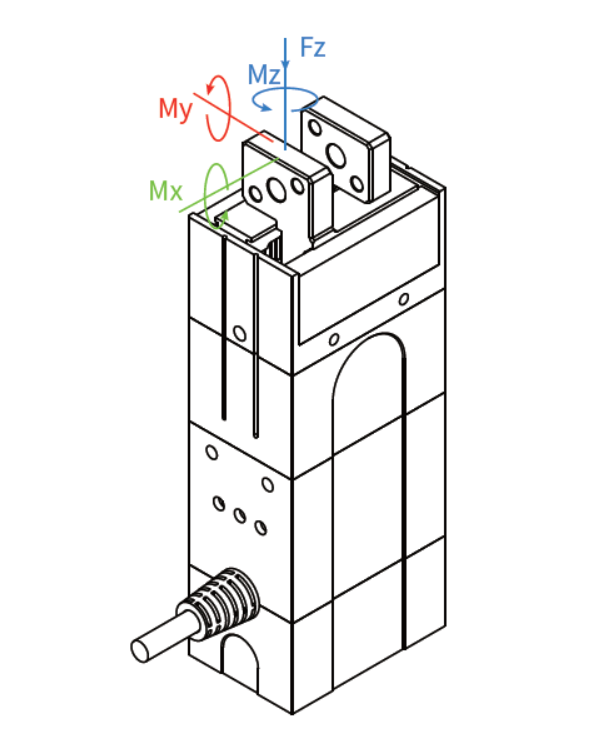
| Tagħbija statika permissibbli f'direzzjoni vertikali | |
| Fz: | 150N |
| Torque permissibbli | |
| Mx: | 2.1 Nm |
| Tiegħi: | 2.34 Nm |
| Mz: | 2 Nm |
Forza Kbira ta' Ikklampjar, Kontroll tal-Forza ta' Preċiżjoni

Il-gripper elettriku jadotta disinn speċjali ta' trasmissjoni u kumpens tal-kalkolu tas-sewqan, il-forza tal-ikklampjar tiegħu hija 80N aġġustabbli kontinwament, il-puplesija totali hija 20mm, ir-ripetibbiltà tiegħu hija ±0.02mm.
Modalità ta' Moviment u Puplesija Aġġustabbli
Il-moviment tal-gripper elettriku jappartjeni għal moviment parallel b'żewġ swaba', l-iqsar ħin tiegħu ta' puplesija waħda huwa biss 0.45s, piż tal-ikklampjar ≤0.8Kg, jista' jissodisfa r-rekwiżit ta' kklampjar stabbli għal-linja tal-produzzjoni.
Struttura Kompatta, Flessibbli biex Tinstalla.

Id-daqs ta' Z-EFG-20 huwa L40*W30*H124.7mm, l-istruttura tiegħu hija kompatta, tappoġġja aktar minn ħames modi ta' installazzjoni, il-kontrollur tiegħu huwa integrat, u jokkupa spazju żgħir, li jista' jkun faċli biex twettaq diversi kompiti ta' kklampjar.


Sewqan u Kontrollur Integrat, Ikklampjar Artab

Id-denb ta' Z-EFG-20 jista' jinbidel faċilment, il-klijenti jistgħu jwaħħlu l-oġġetti mitluba tagħhom, jiddisinjaw id-denb, u jżommu l-gripper elettriku biex iwettaq il-kompiti tal-ikklampjar bl-aktar mod possibbli.
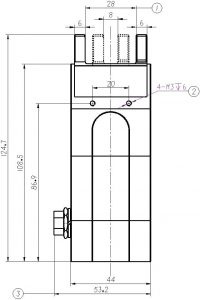
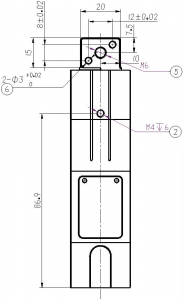
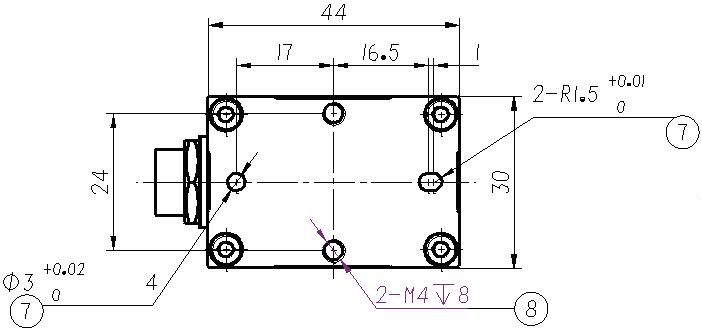
Dijagramma tal-Installazzjoni tad-Dimensjoni
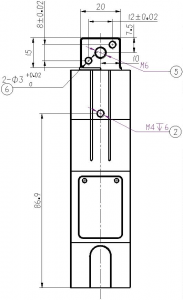
① Il-moviment tas-swaba' tal-qabda
② Pożizzjoni tal-immuntar fuq il-ġenb (toqba bil-kamin)
③ Post tal-wajers tas-sokit tal-avjazzjoni
④ Pożizzjoni tal-forza tal-aġġustament tal-gripper (xellug) u dawl indikatur (lemin)
⑤ Pożizzjoni tal-installazzjoni tal-gripper (toqba bil-kamin)
⑥ Pożizzjoni tal-installazzjoni tal-gripper (toqba tal-brilla)
⑦ Pożizzjoni tal-immuntar tal-qiegħ (toqba tal-labra)
⑧ Pożizzjoni tal-immuntar tal-qiegħ ((toqba bil-kamin)
In-Negozju Tagħna


Kategoriji ta' prodotti
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-C5...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE PGE –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE PGC –...