SERJE TA' GRIPPER ELETTRIKU HITBOT – Gripper Elettriku Rotatorju Z-ERG-20




Kategorija Prinċipali
Driegħ robotiku industrijali / Driegħ robotiku kollaborattiv / Gripper elettriku / Attwatur intelliġenti / Soluzzjonijiet ta' awtomazzjoni
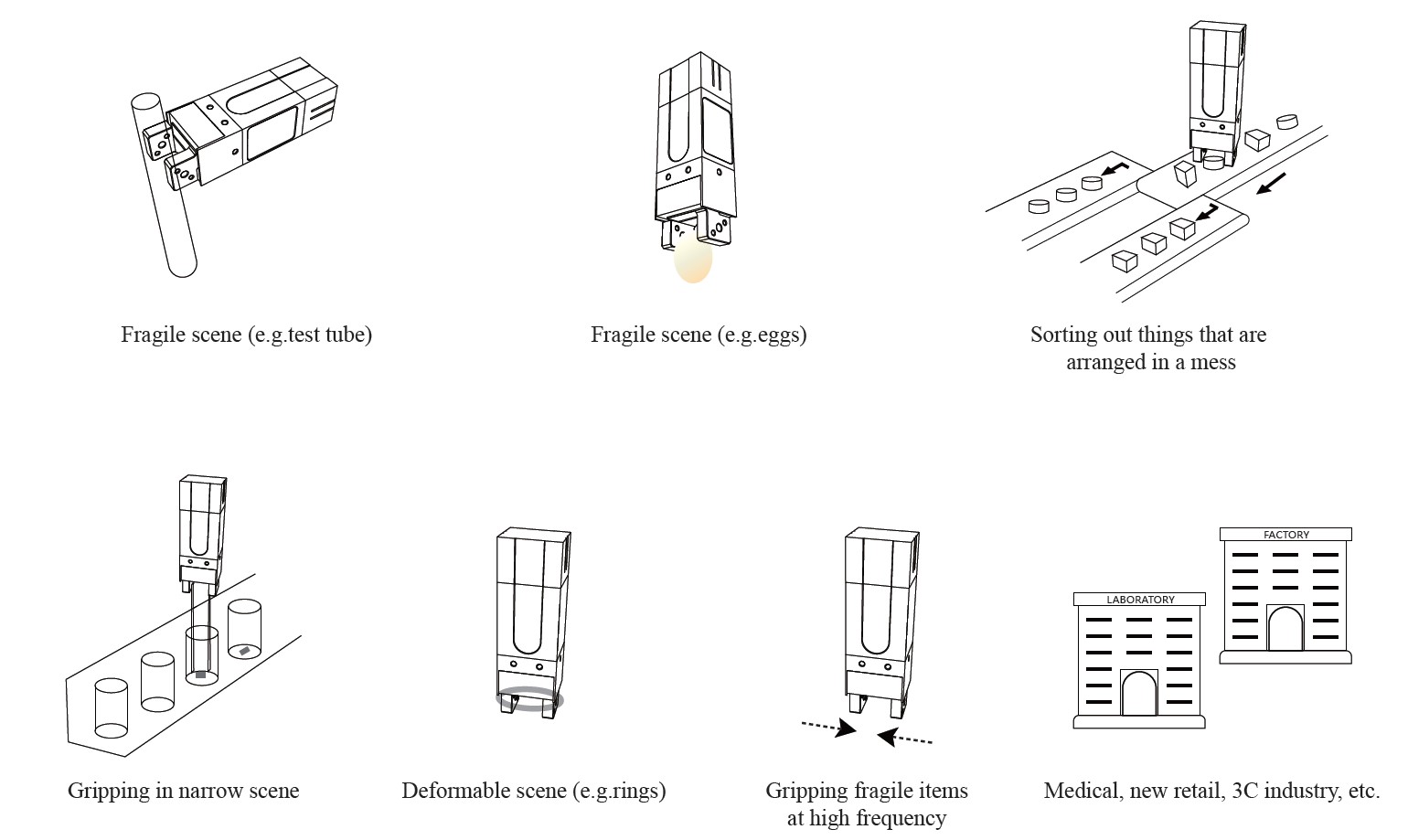
Applikazzjoni
Il-grippers tar-robot tas-serje SCIC Z huma ta’ daqs żgħir b’sistema servo integrata, li tagħmilha possibbli li jinkiseb kontroll preċiż tal-veloċità, il-pożizzjoni, u l-forza tal-ikklampjar. Is-sistema ta’ qbid avvanzata ta’ SCIC għal soluzzjonijiet ta’ awtomazzjoni tippermettilek tiftaħ possibbiltajiet ġodda għall-awtomazzjoni ta’ kompiti li qatt ma ħsibt possibbli.
Karatteristika

·Jappoġġja rotazzjoni infinita u rotazzjoni relattiva, mingħajr ċirku li jiżloq, spiża baxxa ta' manutenzjoni
· Il-forza tar-rotazzjoni u tal-qbid, il-pożizzjoni u l-veloċità jistgħu jiġu kkontrollati b'mod preċiż
· Ħajja twila ta' servizz, ċikli multipli, prestazzjoni aħjar mill-gripper prenumatiku
·Kontrollur integrat: okkupazzjoni żgħira ta' spazju u faċli biex jiġi integrat
·Modalità ta' kontroll: appoġġ għall-kontroll tal-bus Modbus u I/O



Parametru tal-Ispeċifikazzjoni
Il-manipulatur Z-ERG-20 huwa faċli biex tużah man-nies u jappoġġja qabda ratba. Il-gripper elettriku huwa integrat ħafna u għandu ħafna vantaġġi:
●Appoġġ għal rotazzjoni infinita u rotazzjoni relattiva, mingħajr ċirku li jiżloq, spiża baxxa ta' manutenzjoni.
●Ir-rotazzjoni, il-forza tal-ikklampjar, it-trapan, u l-veloċità jistgħu jiġu kkontrollati b'mod preċiż.
●Ħajja twila: għexieren ta' miljuni ta' ċirkli, aħjar mill-kompressuri tal-arja.
●Kontrollur integrat, biex jiffranka l-ispazju, faċli biex jiġi integrat.
●Modalità ta' kontroll: appoġġ għall-kontroll Modbus u I/O.
| Numru tal-Mudell Z-ERG-20 | Parametri |
| Puplesija totali | 20mm aġġustabbli |
| Forza tal-qabda | 10-35N aġġustabbli |
| Ripetibbiltà | ±0.2mm |
| Piż tal-qabda rakkomandat | ≤0.4kg |
| Modalità ta' trasmissjoni | Rack tal-gerijiet + Gwida lineari |
| Riforniment tal-griż tal-komponenti li jiċċaqalqu | Kull sitt xhur jew miljun moviment / ħin |
| Ħin tal-moviment tal-puplesija f'direzzjoni waħda | 0.20sekondi |
| Torque massimu li jdur | 0.3 Nm |
| Veloċità massima tar-rotazzjoni | 240 RPM |
| Firxa ta' rotazzjoni | Rotazzjoni infinita |
| Reazzjoni li ddur | ±1° |
| Piż | 1.0kg |
| Dimensjonijiet | 54 * 54 * 141mm |
| Vultaġġ operattiv | 24V±10% |
| Kurrent nominali | 1.5A |
| Kurrent massimu | 3A |
| Qawwa | 50W |
| Klassi ta' protezzjoni | IP20 |
| Tip ta' mutur | Mutur servo |
| Firxa tat-temperatura operattiva | 5-55℃ |
| Firxa ta' umdità operattiva | RH35-80 (Bla ġlata) |
| Tagħbija statika permissibbli f'direzzjoni vertikali | |
| Fz: | 100N |
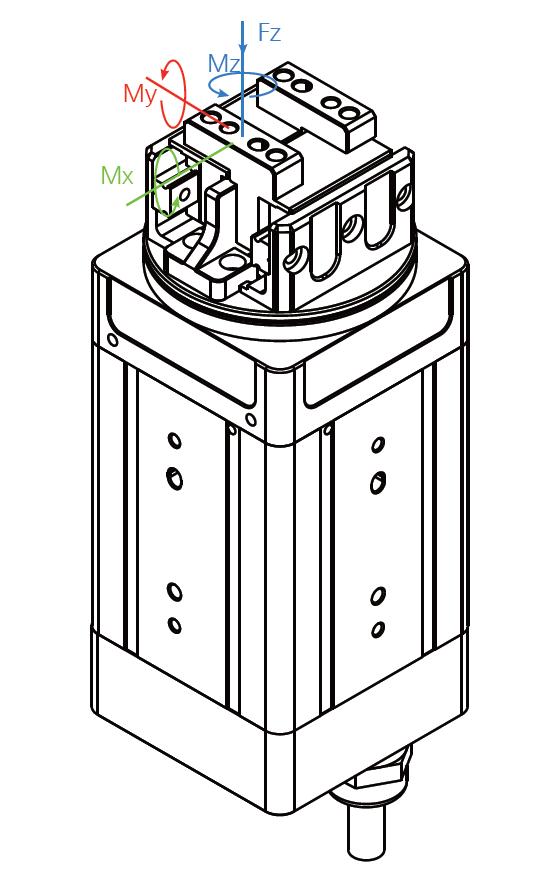
| Torque permissibbli | |
| Mx: | 1.35 Nm |
| Tiegħi: | 0.8 Nm |
| Mz: | 0.8 Nm |
Offset taċ-Ċentru tal-Gravità tat-Tagħbija
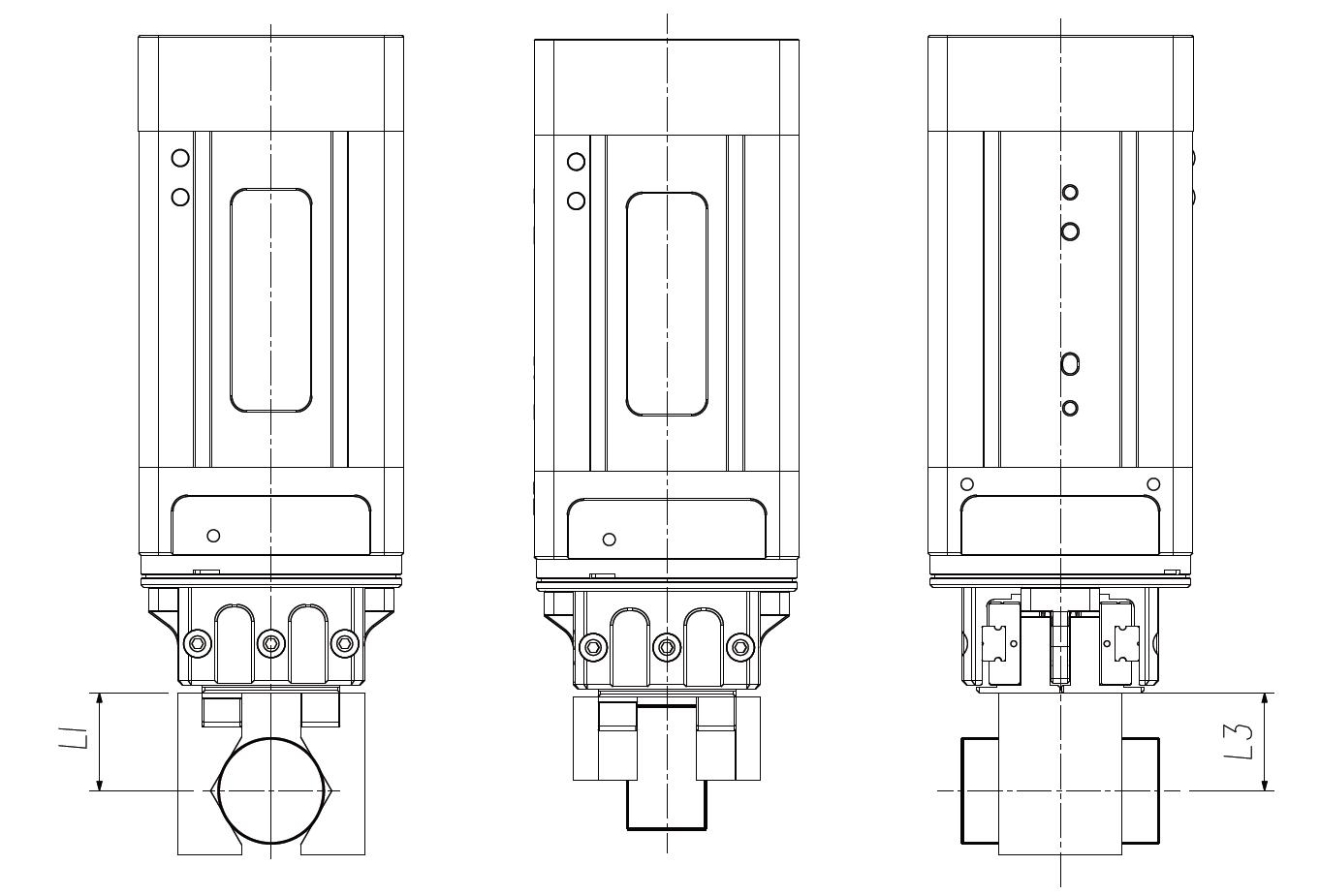
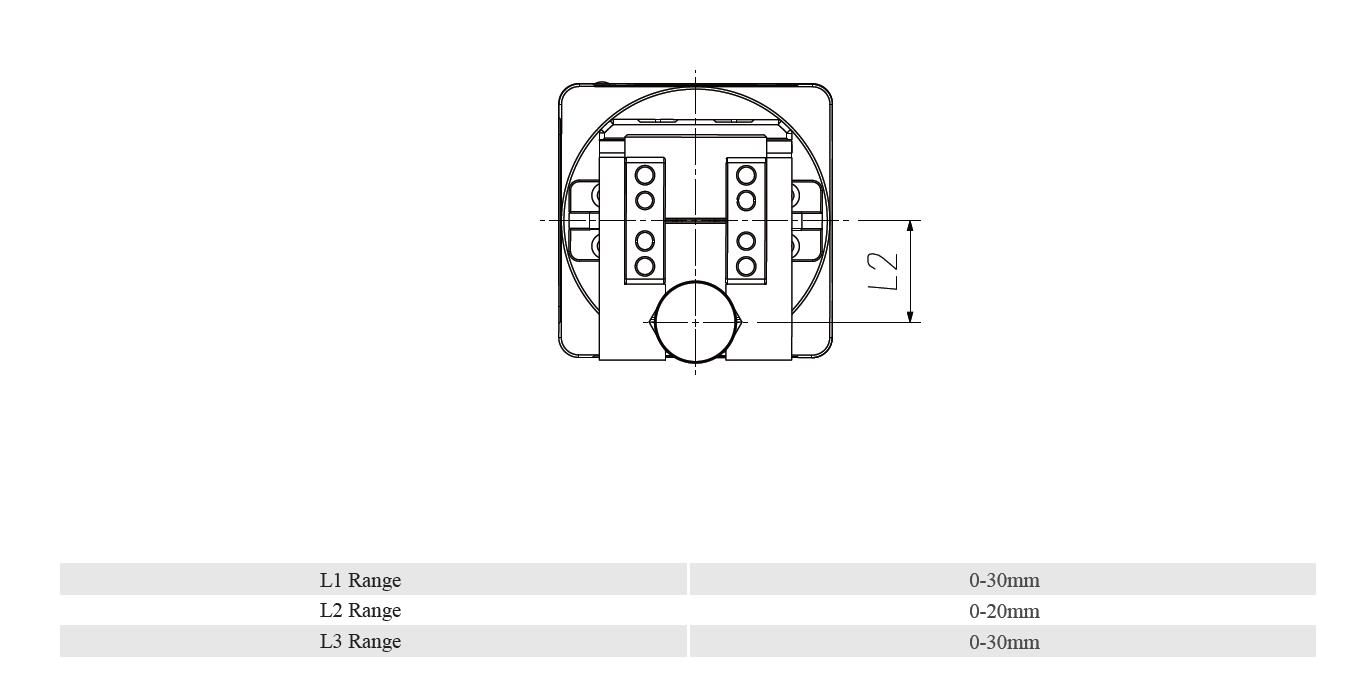
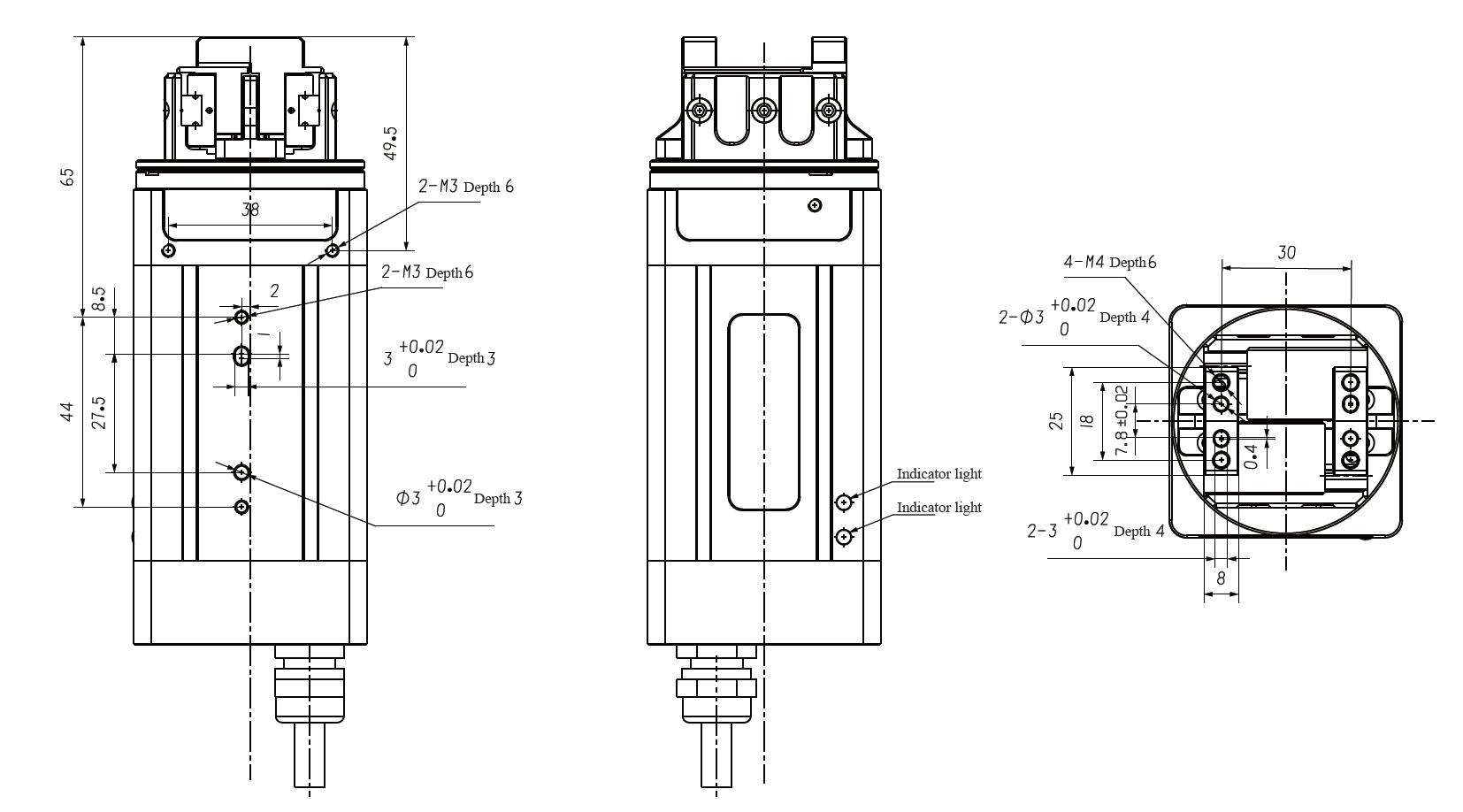
Dijagramma tal-Installazzjoni tad-Dimensjoni
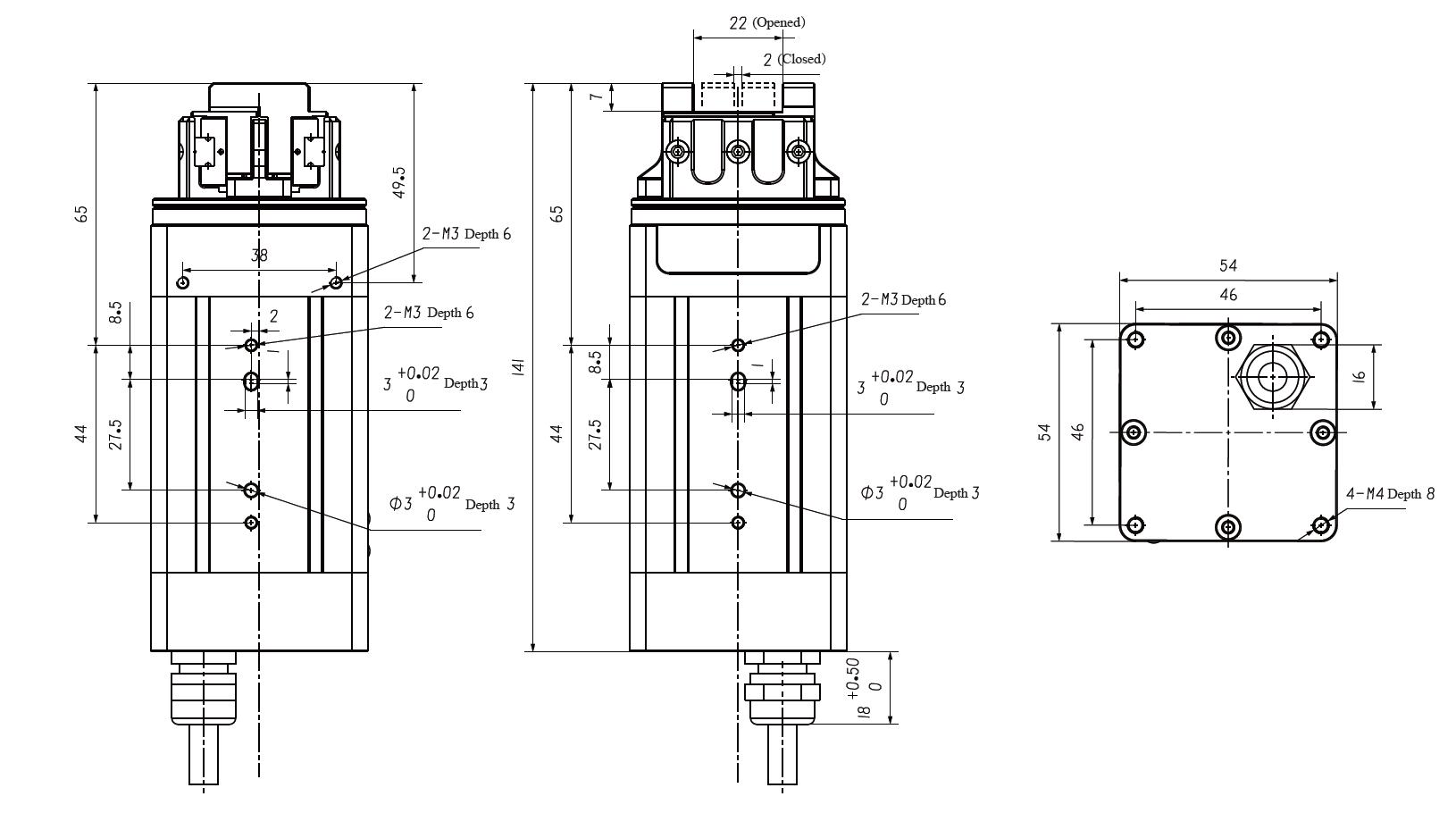
① RKMV8-354 Plagg tal-avjazzjoni b'ħames qlub għal RKMV8-354
② Il-puplesija tal-gripper elettriku hija ta' 20mm
③ Pożizzjoni tal-installazzjoni, uża żewġ viti M6 biex tqabbad mal-flanġ fit-tarf tad-driegħ tar-robot UR
④ Pożizzjoni tal-installazzjoni, pożizzjoni tal-installazzjoni tal-apparat (vit M6)
⑤ Pożizzjoni tal-installazzjoni, pożizzjoni tal-installazzjoni tal-apparat (3 toqob ċilindriċi tal-brilli)
In-Negozju Tagħna


Kategoriji ta' prodotti
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-40...
-

SERJE TAL-MODULU TAL-GRIPPER – FPT Tliet swaba'...
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EMG-4 Parall...
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-20 Paral...
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-C5...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE PGE –...