Driegħ Robotiku ta' Sitt Idejn Driegħ Robotiku Industrijali b'Effiċjenza Għolja
Driegħ Robotiku ta' Sitt Idejn Driegħ Robotiku Industrijali b'Effiċjenza Għolja
Kategorija Prinċipali
Driegħ robotiku industrijali / Driegħ robotiku kollaborattiv / Gripper elettriku / Attwatur intelliġenti / Soluzzjonijiet ta' awtomazzjoni
Applikazzjoni
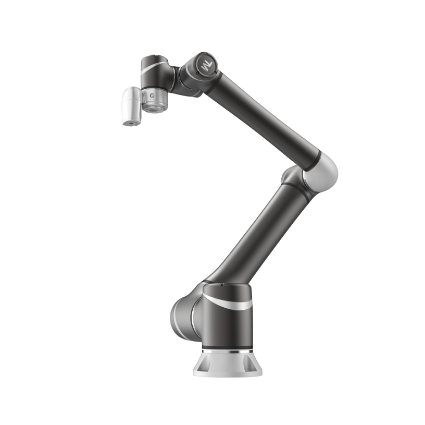
It-TM12 għandu l-itwal firxa fis-serje tar-robots tagħna, u jippermetti operazzjoni kollaborattiva, anke f'applikazzjonijiet li jeħtieġu preċiżjoni u kapaċitajiet ta' rfigħ ta' livell industrijali. Għandu numru ta' karatteristiċi li jippermettulu jintuża b'mod sikur ħdejn ħaddiema umani, u mingħajr il-ħtieġa li jiġu installati ostakli jew ċnut goffi. It-TM12 huwa għażla eċċellenti għall-awtomazzjoni tal-cobot biex tittejjeb il-flessibbiltà, u tiżdiedproduttività.
B'sistema ta' viżjoni ewlenija fil-klassi tagħha, teknoloġija avvanzata tal-AI, sigurtà komprensiva, u tħaddim faċli,L-AI Cobot se tieħu n-negozju tiegħek aktar minn qatt qabel.Ħu l-awtomazzjoni għal-livell li jmiss billi żżid il-produttività, ittejjeb il-kwalità, u tnaqqas l-ispejjeż.
Karatteristiċi
SMART
Ipprepara l-Cobot Tiegħek għall-Futur bl-AI
• Spezzjoni ottika awtomatizzata (AOI)
• Assigurazzjoni tal-kwalità u konsistenza
• Żieda fl-effiċjenza tal-produzzjoni
• Naqqas l-ispejjeż operattivi
SEMPLIĊI
L-ebda esperjenza mhi meħtieġa
• Interfaċċja grafika għal programmazzjoni faċli
• Fluss tax-xogħol tal-editjar orjentat lejn il-proċess
• Gwida sempliċi bl-idejn għat-tagħlim tal-pożizzjonijiet
• Kalibrazzjoni viżwali veloċi bil-bord tal-kalibrazzjoni
SIGUR
Is-sigurtà kollaborattiva hija l-prijorità tagħna
• Jikkonforma mal-ISO 10218-1:2011 u l-ISO/TS 15066:2016
• Sejbien ta' ħabtiet b'waqfien ta' emerġenza
• Iffranka l-ispiża u l-ispazju għall-ostakli u ċ-ċnut
• Issettja limiti ta' veloċità fi spazju tax-xogħol kollaborattiv
Il-kobots li jaħdmu bl-AI jirrikonoxxu l-preżenza u l-orjentazzjoni tal-ambjent u l-partijiet tagħhom biex iwettqu spezzjonijiet viżwali u kompiti dinamiċi ta' pick-and-place. Applika l-AI mingħajr sforz għal-linja tal-produzzjoni u żid il-produttività, naqqas l-ispejjeż, u tqassar il-ħinijiet taċ-ċiklu. Il-viżjoni tal-AI tista' wkoll taqra r-riżultati minn magni jew tagħmir tat-test u tieħu deċiżjonijiet xierqa skont dan.
Minbarra li jtejjeb il-proċessi ta' awtomazzjoni, cobot immexxi mill-AI jista' jsegwi, janalizza u jintegra d-dejta matul il-produzzjoni biex jipprevjeni difetti u jtejjeb il-kwalità tal-prodott. Ittejjeb faċilment l-awtomazzjoni tal-fabbrika tiegħek b'sett komplut ta' teknoloġija tal-AI.
Ir-robots kollaborattivi tagħna huma mgħammra b'sistema ta' viżjoni integrata, li tagħti lill-cobots il-ħila li jipperċepixxu l-inħawi ta' madwarhom, u dan itejjeb b'mod sinifikanti l-kapaċitajiet tal-cobot. Il-viżjoni tar-robot jew il-ħila li "tara" u tinterpreta d-dejta viżwali f'kmandi hija waħda mill-karatteristiċi li tagħmilna superjuri. Hija bidla kbira fit-twettiq preċiż tal-kompiti fi spazji tax-xogħol li jinbidlu b'mod dinamiku, li tagħmel l-operazzjonijiet jimxu aktar bla xkiel, u l-proċessi ta' awtomazzjoni aktar effiċjenti.
Iddisinjat bil-ħsieb tal-utenti ġodda, l-għarfien tal-ipprogrammar mhuwiex prerekwiżit biex tibda bl-AI Cobot. Mozzjoni intuwittiva ta' klikk u ġbid bl-użu tas-softwer tal-ipprogrammar tal-fluss tagħna tnaqqas il-kumplessità. It-teknoloġija brevettata tagħna tippermetti lill-operaturi mingħajr esperjenza fil-kodifikazzjoni jipprogrammaw proġett ta' daqs ħames minuti biss.
Sensuri tas-sigurtà inerenti jwaqqfu l-AI Cobot meta jinstab kuntatt fiżiku, u b'hekk jimminimizzaw il-ħsara potenzjali għal ambjent mingħajr pressjoni u sikur. Tista' wkoll tissettja limiti tal-veloċità għar-robot sabiex ikun jista' jintuża f'varjetà ta' ambjenti eżatt ħdejn il-ħaddiema tiegħek.
Prodotti Relatati



Parametru tal-Ispeċifikazzjoni
| Mudell | TM12 | |
| Piż | 32.8KG | |
| Tagħbija Massima | 12KG | |
| Jilħaq | 1300mm | |
| Firxiet Konġunti | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±166° | |
| Veloċità | J1, J2 | 120°/sekonda |
| J3 | 180°/sekonda | |
| J4 | 180°/sekonda | |
| J5 | 180°/sekonda | |
| J6 | 180°/sekonda | |
| Veloċità Tipika | 1.3m/s | |
| Veloċità Massima | 4m/s | |
| Ripetibbiltà | ± 0.1mm | |
| Grad ta' libertà | 6 ġonot ta' rotazzjoni | |
| I/O | Kaxxa tal-kontroll | Input diġitali: 16 Ħruġ diġitali: 16 Input analogu: 2 Ħruġ analogu: 1 |
| Konnessjoni tal-Għodda | Input diġitali: 4 Ħruġ diġitali: 4 Input analogu: 1 Ħruġ analogu: 0 | |
| Provvista tal-Enerġija I/O | 24V 2.0A għall-kaxxa tal-kontroll u 24V 1.5A għall-għodda | |
| Klassifikazzjoni tal-IP | IP54 (Driegħ tar-Robot); IP32 (Kaxxa tal-Kontroll) | |
| Konsum tal-Enerġija | Tipiċi 300 watt | |
| Temperatura | Ir-robot jista' jaħdem f'firxa ta' temperatura ta' 0-50℃ | |
| Indafa | Klassi ISO 3 | |
| Provvista tal-Enerġija | 100-240 VAC, 50-60 Hz | |
| Interfaċċja tal-I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Komunikazzjoni | RS232, Ethemet, Modbus TCP/RTU (master & slave), PROFINET (Mhux obbligatorju), EtherNet/IP (Mhux obbligatorju) | |
| Ambjent ta' Programmazzjoni | TMflow, ibbażat fuq dijagramma tal-fluss | |
| Ċertifikazzjoni | CE, SEMI S2 (Għażla) | |
| AI u Viżjoni*(1) | ||
| Funzjoni tal-AI | Klassifikazzjoni, Sejbien ta' Oġġetti, Segmentazzjoni, Sejbien ta' Anomaliji, OCR tal-AI | |
| Applikazzjoni | Pożizzjonament, Qari tal-Barcode 1D/2D, OCR, Sejbien ta' Difetti, Kejl, Kontroll tal-Assemblaġġ | |
| Preċiżjoni tal-Pożizzjonament | Pożizzjonament 2D: 0.1mm*(2) | |
| Għajn f'Id (Mibnija ġewwa) | Karmera bil-kulur iffukata awtomatikament b'riżoluzzjoni ta' 5M, distanza ta' ħidma 100mm ~ ∞ | |
| Għajn għal Id (Mhux obbligatorju) | Jappoġġja massimu ta' 2 kameras 2D GigE jew Kamera 2D GigE waħda + Kamera 3D waħda*(3) | |
| *(1)L-ebda dirgħajn robotiċi b'viżjoni integrata TM12X, TM14X, TM16X, TM20X mhumiex disponibbli wkoll. *(2)Id-dejta f'din it-tabella hija mkejla mil-laboratorju TM u d-distanza tax-xogħol hija ta' 100mm. Ta' min jinnota li f'applikazzjonijiet prattiċi, il-valuri rilevanti jistgħu jkunu differenti minħabba fatturi bħas-sors tad-dawl ambjentali fuq il-post, il-karatteristiċi tal-oġġett, u l-metodi ta' programmar tal-viżjoni li se jaffettwaw il-bidla fil-preċiżjoni. *(3)Irreferi għall-websajt uffiċjali ta' TM Plug & Play għall-mudelli ta' kameras kompatibbli ma' TM Robot. | ||
In-Negozju Tagħna


Kategoriji ta' prodotti
-

Driegħ Robotiku Industrijali Kollaborattiv b'6 Assi...
-
Driegħ Robotiku Kummerċjali Robot Barista Produzzjoni Robot...
-

Robot Kollaborattiv Robotiku Industrijali ta' 6 Assi...
-
Robot Kollaborattiv Industrijali 6 Assi 10kg Payl...
-

Tefude Personalizzat Għoli Preċiż PLC Kontroll Indu...
-

Industrija tal-Bajd b'Veloċità Għolja Pick and Place 4...