SERJE TA' GRIPPER ELETTRIKU HITBOT – Gripper Elettriku Kollaborattiv Z-EFG-C50




Kategorija Prinċipali
Driegħ robotiku industrijali / Driegħ robotiku kollaborattiv / Gripper elettriku / Attwatur intelliġenti / Soluzzjonijiet ta' awtomazzjoni
Applikazzjoni
Il-grippers tar-robot tas-serje SCIC Z-EFG huma ta’ daqs żgħir b’sistema servo integrata, li tagħmilha possibbli li jinkiseb kontroll preċiż tal-veloċità, il-pożizzjoni, u l-forza tal-ikklampjar. Is-sistema ta’ qbid avvanzata ta’ SCIC għal soluzzjonijiet ta’ awtomazzjoni tippermettilek tiftaħ possibbiltajiet ġodda għall-awtomazzjoni ta’ kompiti li qatt ma ħsibt possibbli.

Karatteristika

·Sejbien tal-waqgħa tal-gripper, funzjoni tal-ħruġ taż-żona
·Il-forza, il-pożizzjoni u l-veloċità jistgħu jiġu kkontrollati b'mod preċiż permezz tal-Modbus
·Ħajja twila: għexieren ta' miljuni ta' ċikli, li tisboq id-dwiefer tal-arja
·Kontrollur integrat: footprint żgħir, integrazzjoni faċli
·Modalità ta' kontroll: 485 (Modbus RTU), I/O
Stroke 50mm, Forza tal-Ikklampjar 140N, Kompatibbli ma' Driegħ Robotiku ta' 6 assi.
Frekwenza Għolja
L-iqsar ħin ta' puplesija huwa 0.5s
Preċiżjoni Għolja
Ir-ripetibbiltà hija ±0.03mm
Tagħbija Għolja
Piż tal-ikklampjar rakkomandat ≤2kg
Ipplaggja u Ilgħab
Gripper elettriku speċjalment għal driegħ robotiku ta' 6 assi
Denb li jista' jinbidel
Id-denb tiegħu jista' jinbidel, adattat għal diversi talbiet
Forza ta' Ikklampjar Artab
Jista' jwaħħal oġġetti fraġli u deformati

● Tippromwovi rivoluzzjoni fis-sostituzzjoni ta' grippers pnewmatiċi b'grippers elettriċi, l-ewwel gripper elettriku b'sistema servo integrata fiċ-Ċina.
● Sostituzzjoni perfetta għal kompressur tal-arja + filtru + valv tas-solenojd + valv tat-throttle + gripper pnewmatiku
● Ħajja ta' servizz b'ċikli multipli, konsistenti maċ-ċilindru Ġappuniż tradizzjonali



Parametru tal-Ispeċifikazzjoni
| Numru tal-Mudell Z-EFG-C50 | Parametri |
| Puplesija totali | 50mm aġġustabbli |
| Forza tal-qabda | 40-140N aġġustabbli |
| Ripetibbiltà | ±0.03mm |
| Piż tal-qabda rakkomandat | ≤2kg |
| Modalità ta' trasmissjoni | Rack tal-gerijiet + Gwida sferika |
| Riforniment tal-griż tal-komponenti li jiċċaqalqu | Kull sitt xhur jew miljun moviment / ħin |
| Ħin tal-moviment tal-puplesija f'direzzjoni waħda | 0.5sekondi |
| Modalità ta' moviment | Żewġ swaba’ jiċċaqalqu orizzontalment |
| Piż | 1kg |
| Dimensjonijiet (T * W * H) | 72 * 72 * 143mm |
| Vultaġġ operattiv | 24V±10% |
| Kurrent nominali | 0.8A |
| Kurrent massimu | 2A |
| Qawwa | 20W |
| Klassi ta' protezzjoni | IP20 |
| Tip ta' mutur | DC mingħajr brushes |
| Firxa tat-temperatura operattiva | 5-55℃ |
| Firxa ta' umdità operattiva | RH35-80 (Bla ġlata) |

| Tagħbija statika permissibbli f'direzzjoni vertikali | |
| Fz: | 300N |
| Torque permissibbli | |
| Mx: | 7 Nm |
| Tiegħi: | 7 Nm |
| Mz: | 7 Nm |
Sewqan u Kontrollur Integrati
Il-gripper elettriku Z-EFG-C50 għandu sistema servo integrata ġewwa, il-puplesija totali tiegħu hija ta' 50mm, il-forza tal-ikklampjar hija ta' 40-140N, il-puplesija u l-forza tal-ikklampjar tiegħu huma aġġustabbli, u r-ripetibbiltà tiegħu hija ta' ±0.03mm.

Kompatibbli mad-Driegħ tar-Robot ta' Sitt Assi

Il-gripper elettriku jista' jkun kompatibbli mad-driegħ tar-robot ta' 6 assi, biex jirrealizza plug and play, l-iqsar ħin ta' puplesija tiegħu huwa biss 0.5s, li jista' jissodisfa t-talbiet tal-ikklampjar għal linja ta' produzzjoni stabbli.
Daqs Żgħir, Flessibbli għall-Installazzjoni

Z-EFG-C50 għandu jadotta l-mod ta' trasmissjoni ta' rack tal-gerijiet + ball guide rail, id-daqs tal-prodott huwa L72 * W72 * H143mm, jista' jkun flessibbli biex jiġi rranġat f'kundizzjoni ta' żona żgħira.


Reazzjoni Mgħaġġla, Preċiżjoni għall-Kontroll tal-Forza

L-iqsar ħin ta' puplesija waħda huwa biss 0.5s, jista' jittratta l-kompitu ta' kklampjar veloċi, il-partijiet tad-denb tiegħu jistgħu jinbidlu fi kwalunkwe ħin, il-klijenti jistgħu jaġġustaw id-denb skont il-ħtieġa.
Modi ta' Kontroll Immultiplikati, Faċli biex Topera

Il-konfigurazzjoni ta' Z-EFG-C50 hija sempliċi, għandha modi ta' kontroll abbundanti, inklużi 485 (Modbus RTU), Pulse, I/O, u hija kompatibbli mas-sistema ta' kontroll prinċipali tal-PLC.

Offset taċ-Ċentru tal-Gravità tat-Tagħbija
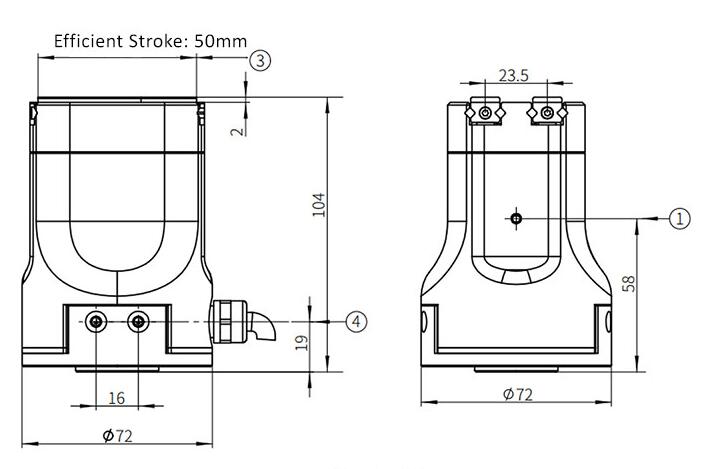
1. Indikatur LED
2. Sit tal-Installazzjoni, uża 4 viti M4
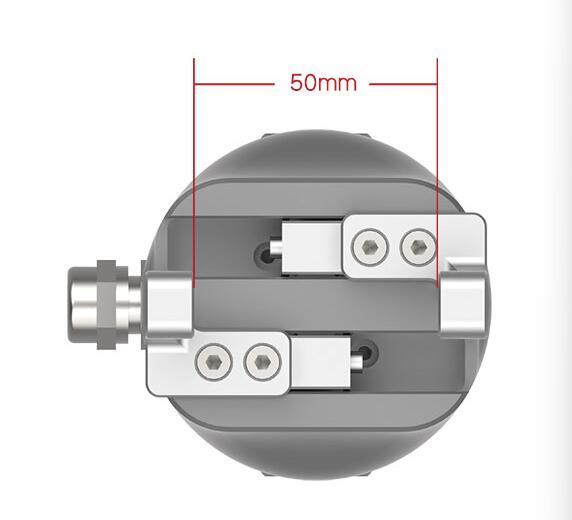
3. Il-puplesija tal-gripper elettriku hija ta' 50mm
4. Ħruġ tal-ġewż
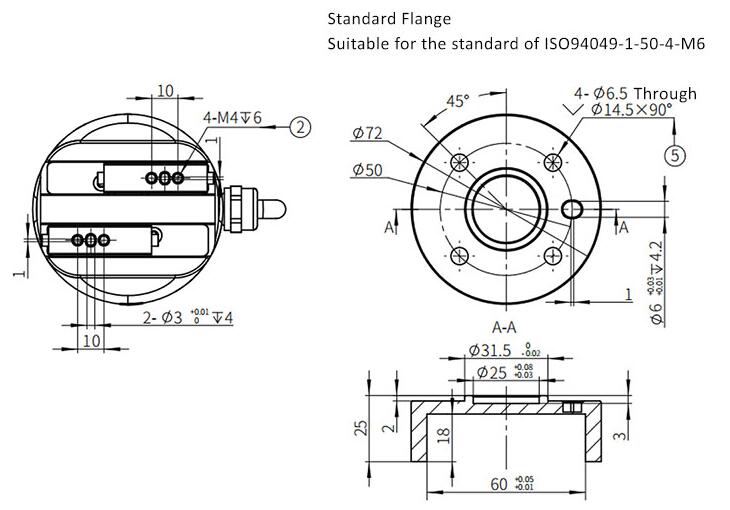
5. Sit tal-installazzjoni, uża 4 viti M6 biex tikkonnettja mal-flanġ tat-terminal tad-driegħ tar-robot kollaborattiv
In-Negozju Tagħna


Kategoriji ta' prodotti
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE CG – ...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE PGC –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE PGE –...
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-12 Paral...