SERJE TA' GRIPPER ELETTRIKU HITBOT – Gripper Elettriku Parallel Z-EFG-26



Kategorija Prinċipali
Driegħ robotiku industrijali / Driegħ robotiku kollaborattiv / Gripper elettriku / Attwatur intelliġenti / Soluzzjonijiet ta' awtomazzjoni
Applikazzjoni
Il-grippers tar-robot tas-serje SCIC Z-EFG huma ta’ daqs żgħir b’sistema servo integrata, li tagħmilha possibbli li jinkiseb kontroll preċiż tal-veloċità, il-pożizzjoni, u l-forza tal-ikklampjar. Is-sistema ta’ qbid avvanzata ta’ SCIC għal soluzzjonijiet ta’ awtomazzjoni tippermettilek tiftaħ possibbiltajiet ġodda għall-awtomazzjoni ta’ kompiti li qatt ma ħsibt possibbli.

Karatteristika
·Sejbien tal-waqgħa tal-gripper, funzjoni tal-ħruġ taż-żona
·Il-forza, il-pożizzjoni u l-veloċità jistgħu jiġu kkontrollati b'mod preċiż permezz tal-Modbus
· Ħajja twila: għexieren ta' miljuni ta' ċikli, li tisboq id-dwiefer tal-arja
·Kontrollur integrat: footprint żgħir, integrazzjoni faċli
·Modalità ta' kontroll: 485 (Modbus RTU), I/O
Il-forza tal-ikklampjar, il-veloċità tista' tkun preċiża biex tiġi kkontrollata permezz ta' Modbus
Applikazzjoni Multipla
Għandu skoperta ta' waqgħa tal-ikklampjar u output tad-distrett
Preċiż għall-Kontroll
Il-forza tal-ikklampjar, il-bit, il-veloċità jistgħu jiġu kkontrollati minn Modbus
Ħajja Twila
Għaxriet ta' miljuni ta' ċikli, fuq gripper tal-arja
Kontrollur Inkorporat
Jokkupa spazju żgħir, konvenjenti biex jintegra.
Malajr biex Tirreaġixxi
L-iqsar ħin ta' puplesija waħda huwa biss 0.25s
Ikklampjar Artab
Jista' jwaħħal oġġetti fraġli, bħal bajd, tazza tal-ħġieġ, eċċ.




Parametru tal-Ispeċifikazzjoni
Iż-Z-EFG-26 huwa gripper parallel elettriku b'żewġ swaba', żgħir fid-daqs iżda b'saħħtu biex jaqbad ħafna oġġetti rotob bħal bajd, pajpijiet, komponenti elettroniċi, eċċ.
● Il-gripper elettriku Z-EFG-26 għandu kontrollur integrat.
●Il-puplesija u l-forza tal-qbid tagħha huma aġġustabbli.
●It-terminals jistgħu jiġu sostitwiti biex jadattaw għal diversi rekwiżiti.
●Aqbad faċilment oġġetti fraġli u deformabbli, bħal bajd, tubi tat-test, ċrieki, eċċ.
●Adattat għal xeni mingħajr sorsi ta' arja (bħal laboratorji, u sptarijiet).
| Numru tal-Mudell Z-EFG-26 | Parametri |
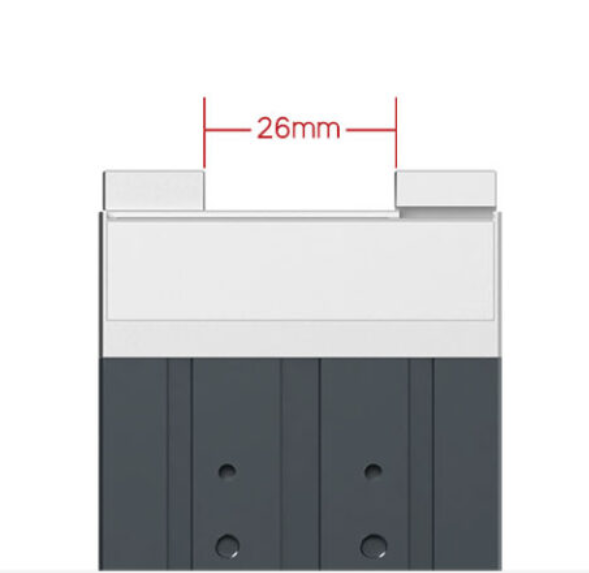
| Total puplesija | 26mm |
| Forza tal-qabda | 6~15N |
| Ripetibbiltà | ±0.02mm |
| Piż tal-qabda rakkomandat | Massimu 0.3kg |
| Trażmissjoni modalità | Rack tal-gerijiet + Gwida tar-romblu trasversali |
| Riforniment tal-griż tal-komponenti li jiċċaqalqu | Kull sitt xhur jew miljun moviment / ħin |
| Ħin tal-moviment tal-puplesija f'direzzjoni waħda | 0.25sekondi |
| Firxa tat-temperatura operattiva | 5-55℃ |
| Firxa ta' umdità operattiva | RH35-80(Ebda ġlata) |
| Modalità ta' moviment | Żewġ swaba’ jiċċaqalqu orizzontalment |
| Kontroll tal-puplesija | Aġġustabbli |
| Aġġustament tal-forza tal-ikklampjar | Aġġustabbli |
| Piż | 0.45kg |
| Dimensjonijiet(T*W*Għ) | 55 * 26 * 97mm |
| Tqegħid tal-kontrollur | Mibni fil- |
| Qawwa | 10W |
| Tip ta' mutur | DC mingħajr brushes |
| Kurrent Peak | 1A |
| Vultaġġ nominali | 24V |
| Kurrent ta' standby | 0.4A |
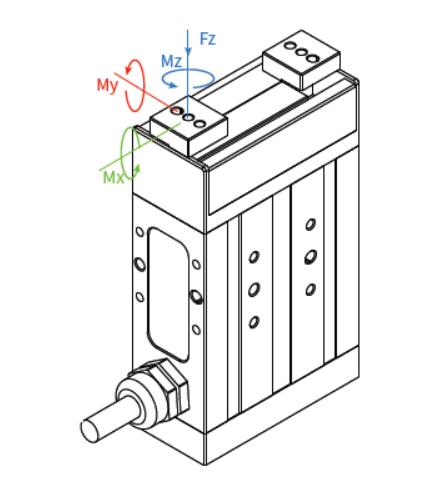
| Tagħbija statika permissibbli f'direzzjoni vertikali | |
| Fz: | 250N |
| Torque permissibbli | |
| Mx: | 2.4 Nm |
| Tiegħi: | 2.6 Nm |
| Mz: | 2 Nm |
Kontroll tal-Forza ta' Preċiżjoni Preċiżjoni għar-Ripetizzjoni

Il-gripper elettriku adotta disinn speċjali ta' trasmissjoni u kalkolu tas-sewqan biex jikkumpensa, il-puplesija totali tiegħu hija ta' 26mm, il-forza tal-ikklampjar hija ta' 6-15N, il-puplesija u l-forza tal-ikklampjar jistgħu jiġu aġġustati, u r-ripetibbiltà tiegħu hija ta' ±0.02mm.
Reazzjoni Mgħaġġla, Aktar Stabbli

L-iqsar ħin ta' puplesija waħda huwa biss 0.25s, jista' jissodisfa r-rekwiżit ta' kklampjar veloċi u stabbli għal-linja ta' produzzjoni.
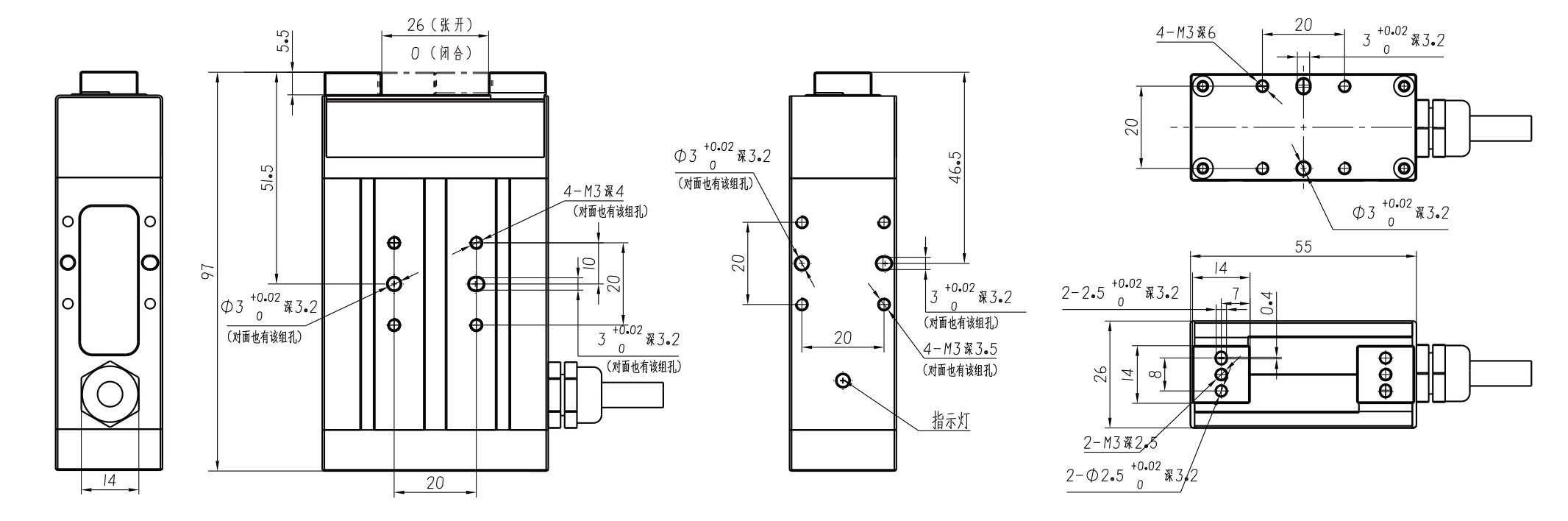
Figura Żgħira, Faċli biex Tintegra

Id-daqs ta' Z-EFG-26 huwa L55*W26*H97mm, l-istruttura tiegħu hija kompatta, tappoġġja aktar minn ħames modi ta' installazzjoni flessibbli, huwa kontrollur integrat, jokkupa spazju żgħir, jista' faċilment jittratta ħafna kompiti għal diversi rekwiżiti ta' kklampjar.

Sewqan Integrat u Ikklampjar Artab tal-Kontrollur

Il-parti tad-denb tal-gripper elettriku tista' tinbidel faċilment, il-piż tal-ikklampjar tiegħu huwa ta' 300g, il-klijenti jistgħu jiddisinjaw apposta l-parti tad-denb tal-gripper biex tissodisfa l-oġġetti tal-ikklampjar tagħhom stess, biex il-gripper elettriku jkun jista' jlesti l-kompiti tal-ikklampjar bl-aktar mod possibbli.
Modi ta' Kontroll Multiplikat, Faċli biex Topera

Il-konfigurazzjoni tal-gripper Z-EFG-26 hija sempliċi, għandha mod ta' kontroll abbundanti: 485 (Modbus RTU), Pulse, I/O, u hija kompatibbli mas-sistema ta' kontroll prinċipali tal-PLC.

Dijagramma tal-Installazzjoni tad-Dimensjoni
In-Negozju Tagħna


Kategoriji ta' prodotti
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE PGS –...
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-C6...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

GRIPPER ELETTRIKU SERVO DH ROBOTICS SERJE RGI –...
-

SERJE TA' GRIPPER ELETTRIKU HITBOT – Z-EFG-20P Para...
-

SERJE TAL-MODULU TAL-GRIPPER – FPT Żewġ swaba’ T...