Gripper tar-Robot Kollaborattiv – ISC Inner Soft Clamp Cobot Arm Gripper



Kategorija Prinċipali
Driegħ robotiku industrijali / Driegħ robotiku kollaborattiv / Gripper elettriku / Attwatur intelliġenti / Soluzzjonijiet ta' awtomazzjoni / gripper tad-driegħ kobot / gripper artab / gripper tad-driegħ robotiku
Applikazzjoni

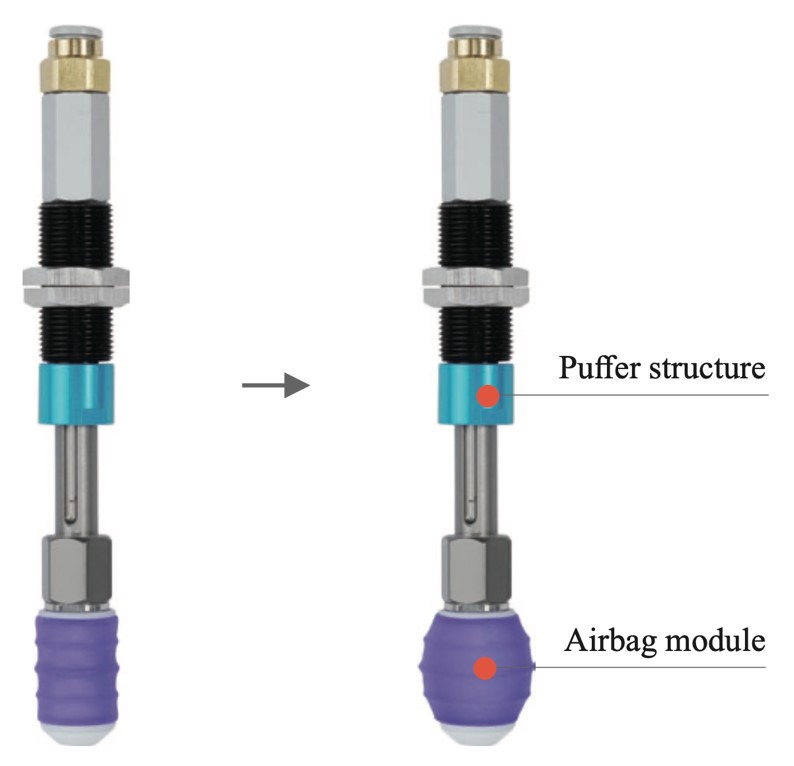
Il-morsa ta' appoġġ interna ISC hija apparat innovattiv artab, li d-disinn tiegħu jimita l-morfoloġija ta' awtodifiża tal-ħut puffer. Billi tintefaħ l-arja bil-pressjoni, l-apparat jista' jespandi u jlesti l-qbid ta' appoġġ intern.
Minħabba li l-parti li tikkuntattja mal-biċċa tax-xogħol hija gomma tas-silikon ratba, wara li żżid il-pressjoni, ikun hemm saff ta' "kuxxin tal-arja" bejn l-appoġġ riġidu u l-wiċċ ta' kuntatt, li jagħmel l-istress uniformi u mhux probabbli li jagħmel ħsara lill-biċċa tax-xogħol. Barra minn hekk, il-pressjoni tal-arja tad-dħul tista' tiġi aġġustata biex tikkontrolla l-estensjoni tal-airbag u l-istress li jikkuntattja mal-biċċa tax-xogħol, sabiex tiżdied b'mod sinifikanti l-irtubija tas-sistema tal-qbid.
Karatteristika

·Midja tas-Sewqan: arja nadifa
·Tul ta' Ħajja Standard tax-Xogħol: >100,000 darba
·Frekwenza Massima tat-Tħaddim (cpm): 300
● Il-morsa ta' appoġġ interna għandha struttura speċjali tal-airbag u tista' tipproduċi deformazzjoni differenti flimkien mal-pressjoni interna.
● Pressjoni pożittiva tad-dħul: L-apparat jittawwal, jappoġġja b'mod awto-adattattiv il-wiċċ intern tal-oġġett u jlesti l-qbid.
● Pressjoni negattiva tad-dħul: L-apparat jippreżenta stati naturali u jirrilaxxa l-oġġetti.
Il-grippers rotob SFG ġew skjerati ma' dirgħajn robotiċi kollaborattivi ta' klassi dinjija, inklużi:

Robot Delta b'4 assi orizzontali (SCARA).
Arm robot industrijali Nachi Fujikoshi
Robot parallel (Delta) b'4 assi ABB
Robot kollaborattiv ta' 6 assi UR
Robot kollaborattiv ta' 6 assi AUBO



Parametru tal-Ispeċifikazzjoni
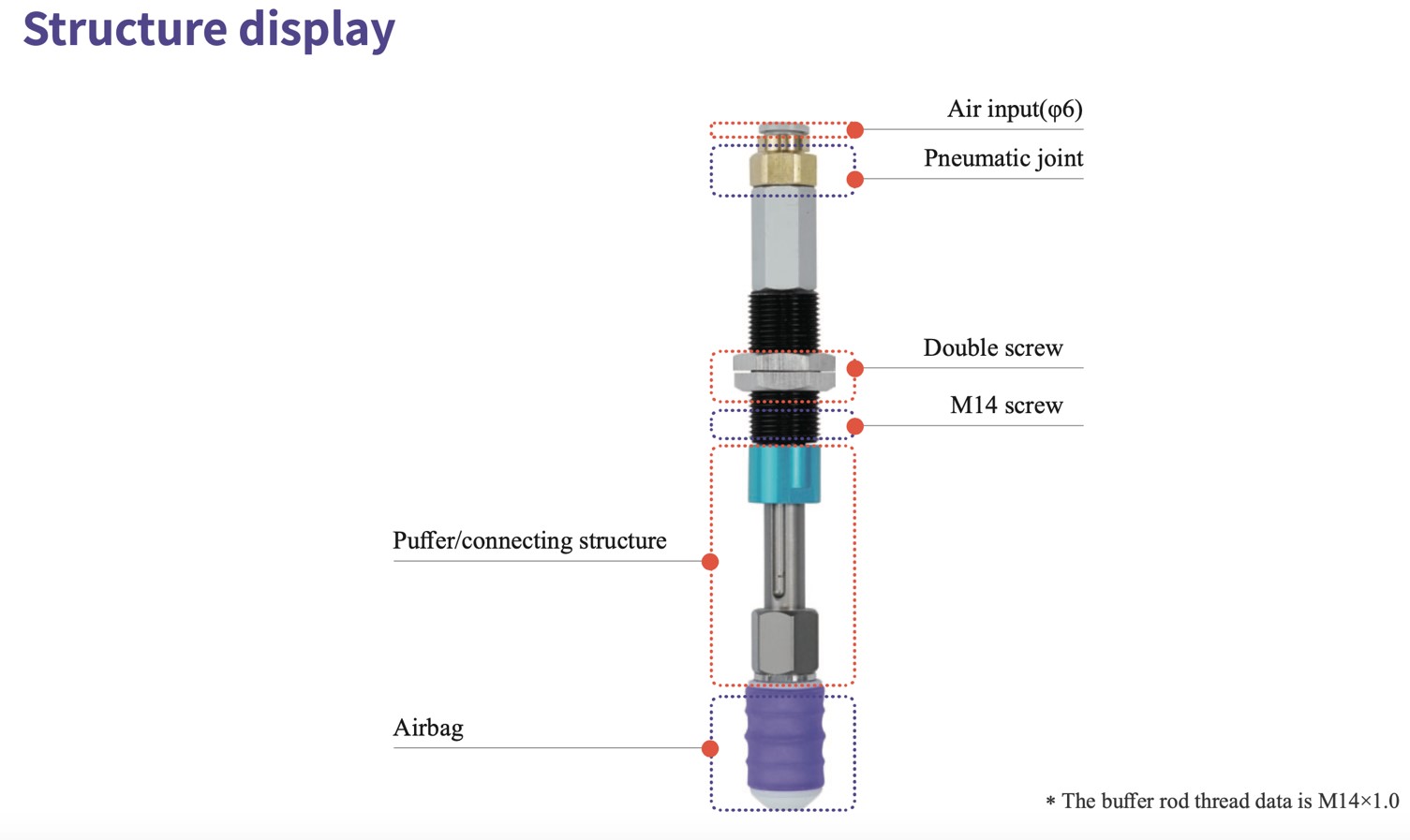
Il-morsa ta' appoġġ intern tal-airbag ISC hija apparat innovattiv artab, li d-disinn tiegħu jimita l-morfoloġija ta' awtodifiża tal-ħut puffer. Permezz tal-inflazzjoni tal-arja bil-pressjoni, l-apparat jista' jespandi u jlesti l-qbid tal-appoġġ intern. Peress li l-pressjoni tal-arja tad-dħul tista' tiġi kkontrollata b'mod preċiż, il-forza tal-qbid fuq l-apparat mal-biċċa tax-xogħol tista' tiġi kkontrollata, li ma tagħmilx ħsara faċli lill-biċċa tax-xogħol.
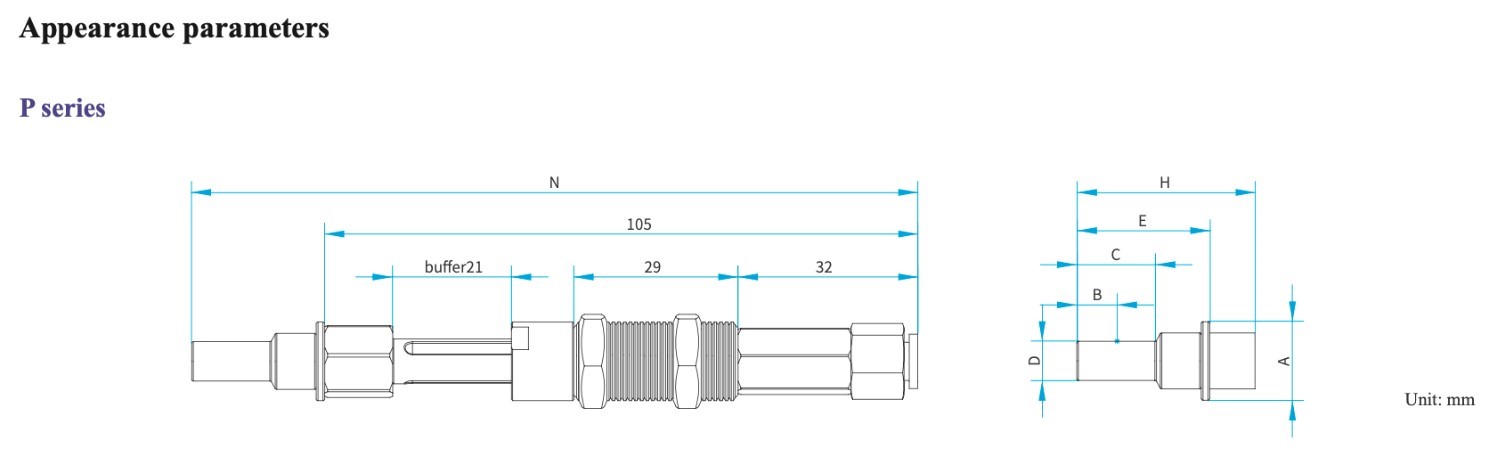
| Mudell | Għoli totali tal-modulu tal-airbag H | Dijametru tal-wiċċ tal-kuntatt D | Dijametru tal-parti strutturali A | Għoli mid-dijametru tax-xogħol sal-qiegħ B | Għoli tal-wiċċ ta' kuntatt effettiv C | Għoli tax-xogħol tal-airbag modulu E | Tul totali N |
| ISC-P4.5E | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | E+105 |
| ISC-P5E | 27.5 | 5 | 14 | 5 | 10 | 19.5 | E+105 |
| ISC-P6E | 30.5 | 6 | 14 | 6 | 12 | 22.5 | E+105 |
| ISC-P7E | 31.5 | 7 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P8E | 31.5 | 8 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P9E | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P10E | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P11E | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | E+105 |
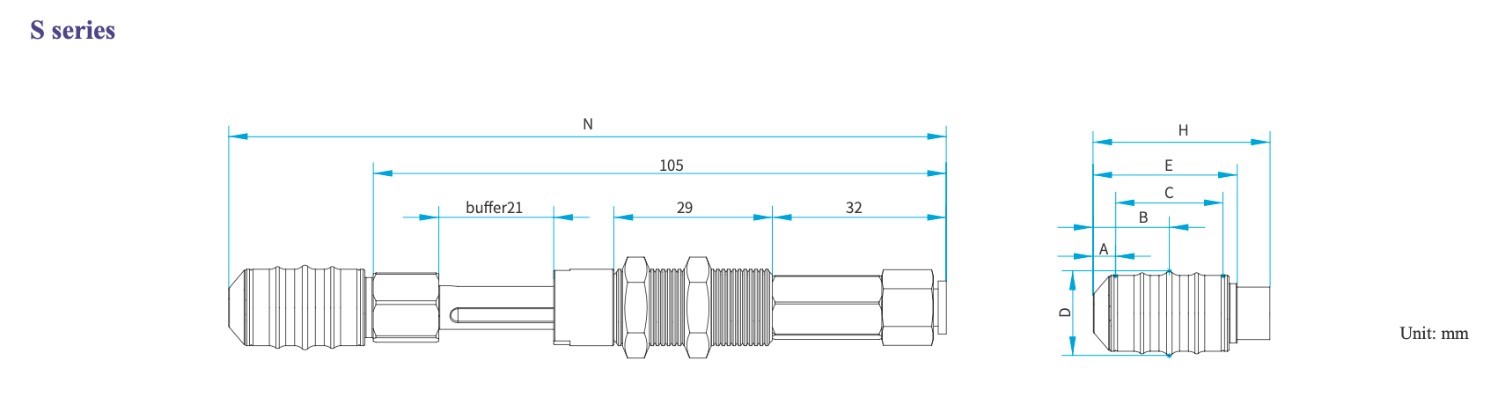
| Mudell | Għoli totali tal-modulu tal-airbag H | Dijametru tal-wiċċ tal-kuntatt D | għoli tal-gwida A | Għoli mid-dijametru tax-xogħol sal-qiegħ B | Għoli tal-wiċċ ta' kuntatt effettiv C | Għoli tax-xogħol tal-airbag modulu E | Tul totali N |
| ISC-S14E | 32.5 | 14 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S15.5E | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S18E | 40.5 | 18 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S20.5E | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S23E | 40.5 | 23 | 6 | 19 | 26 | 34.5 | E+105 |
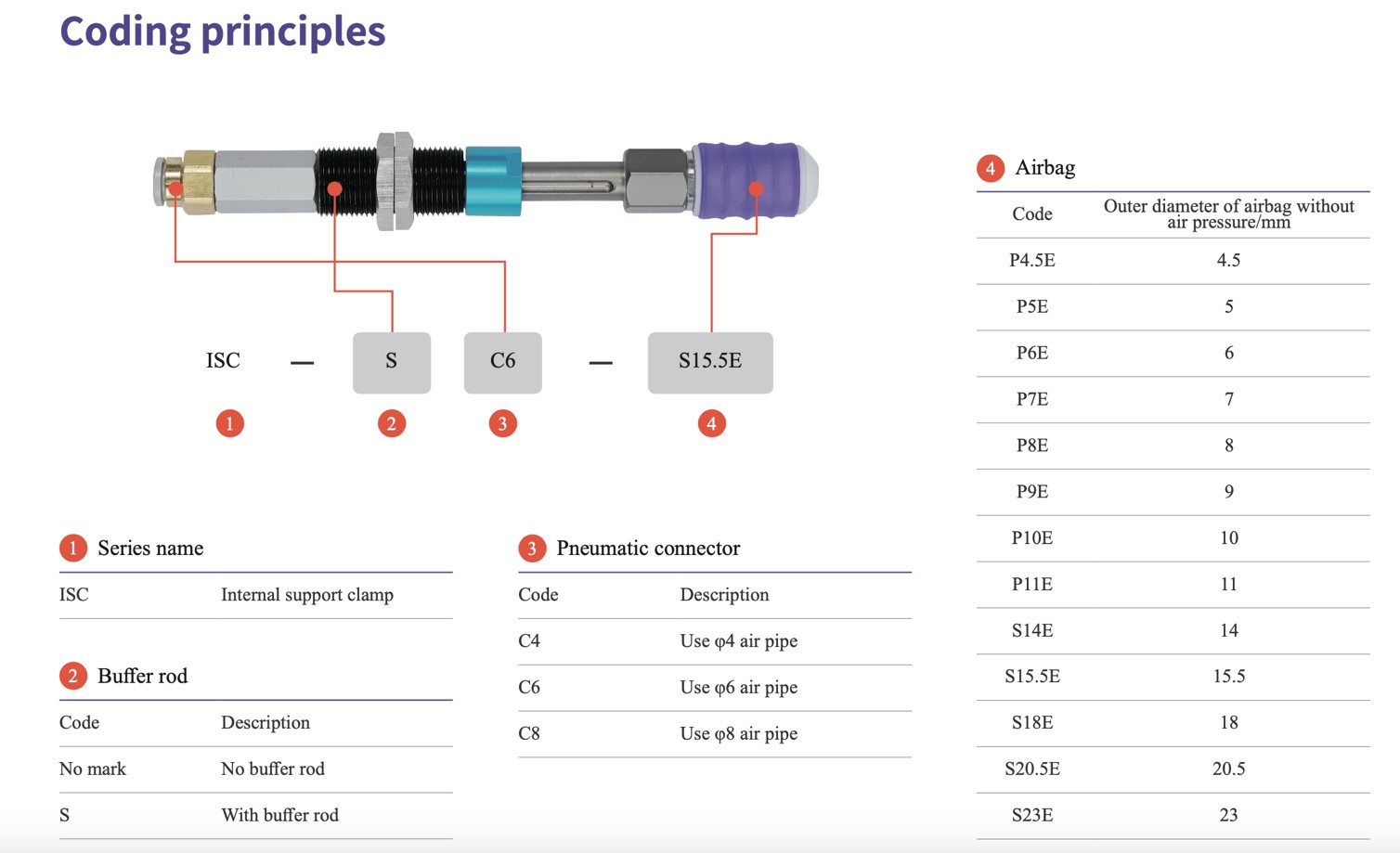
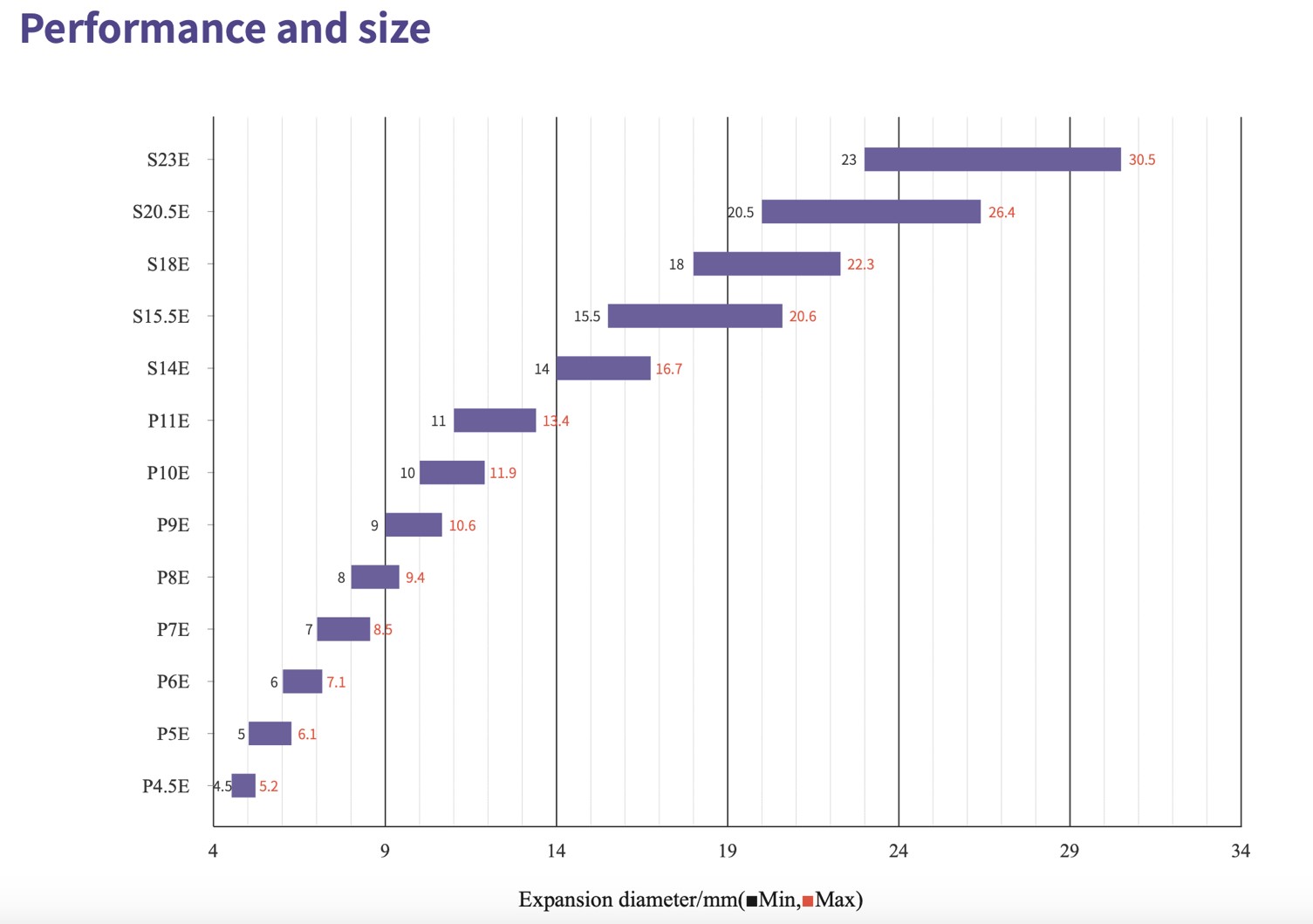
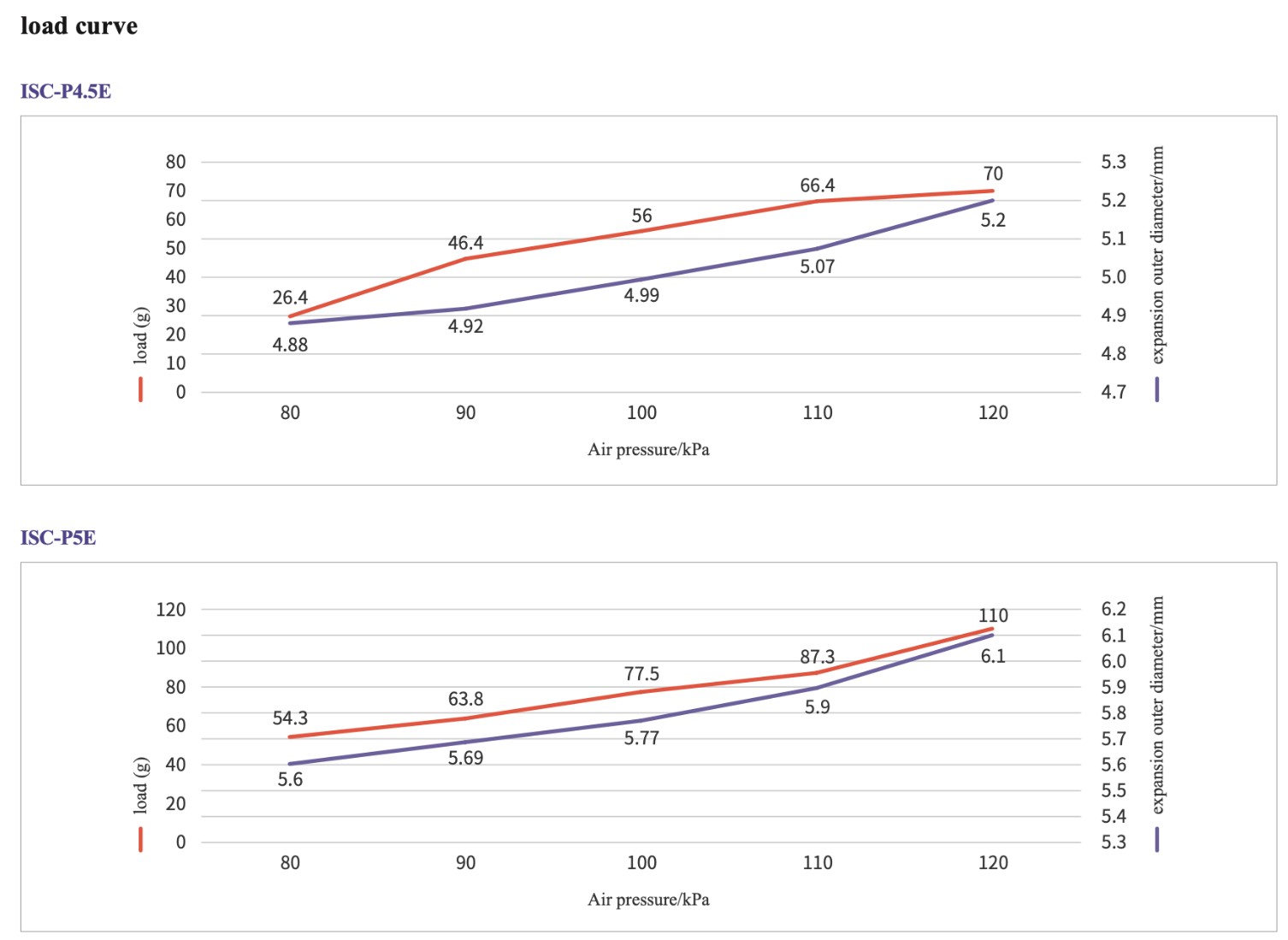
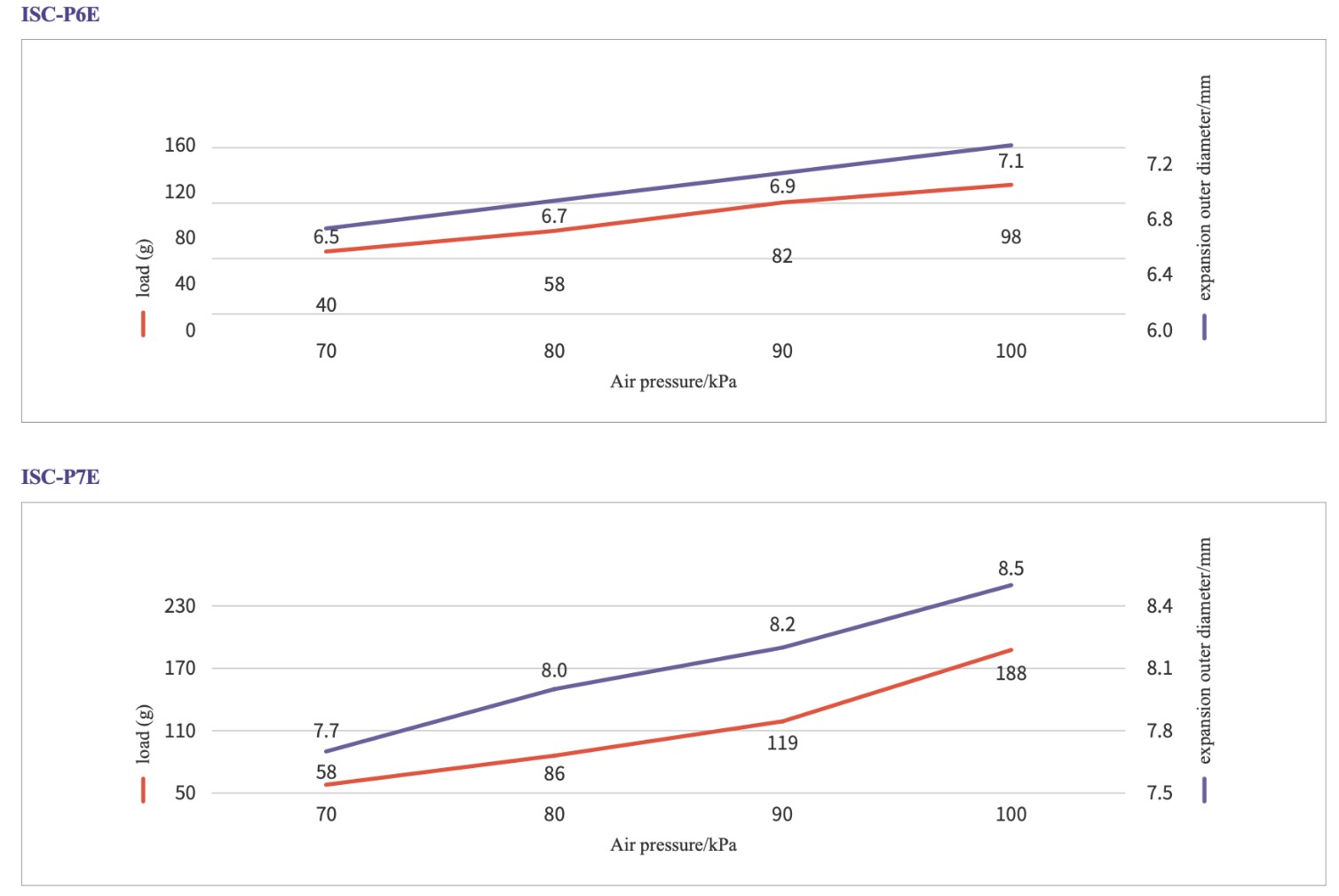
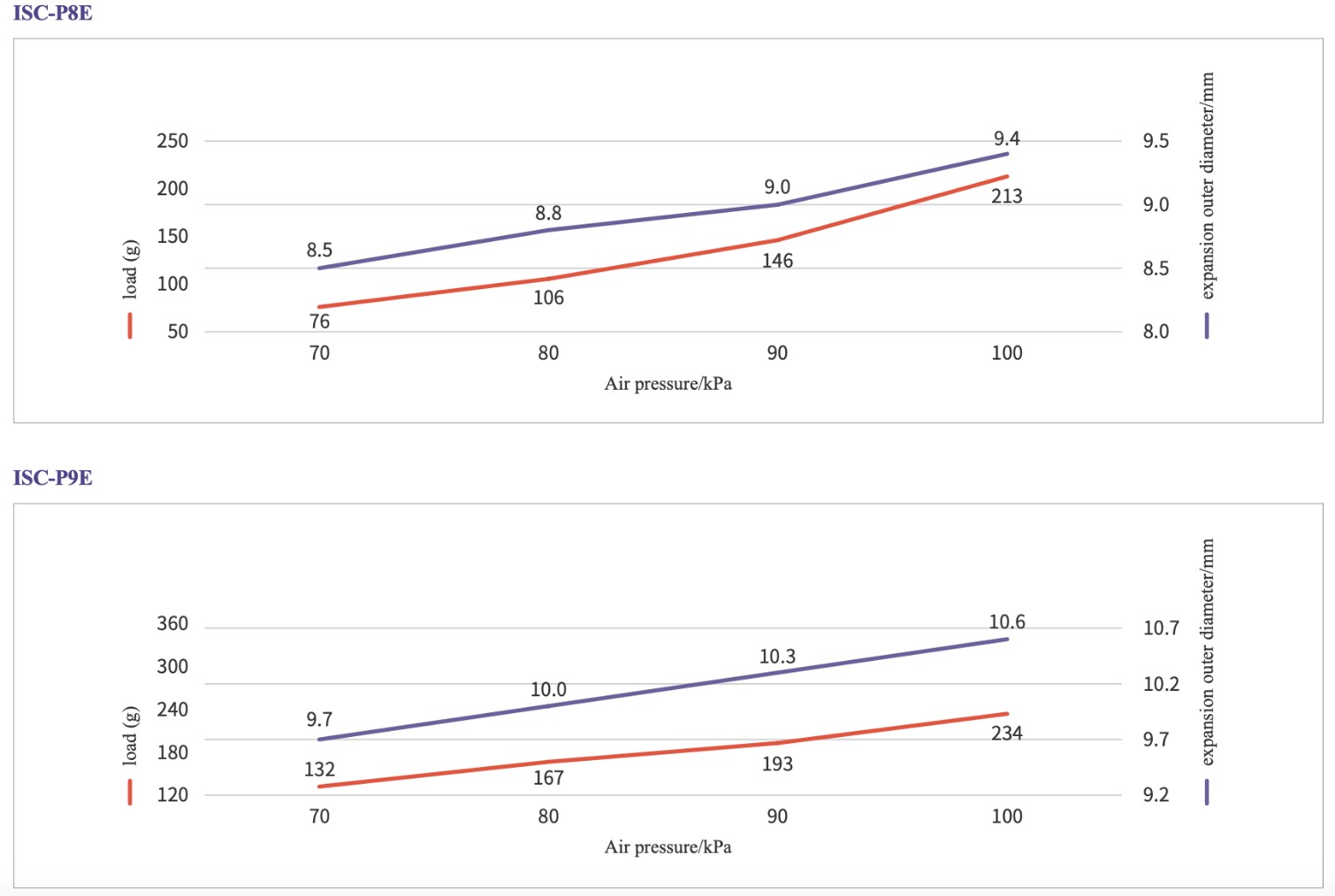
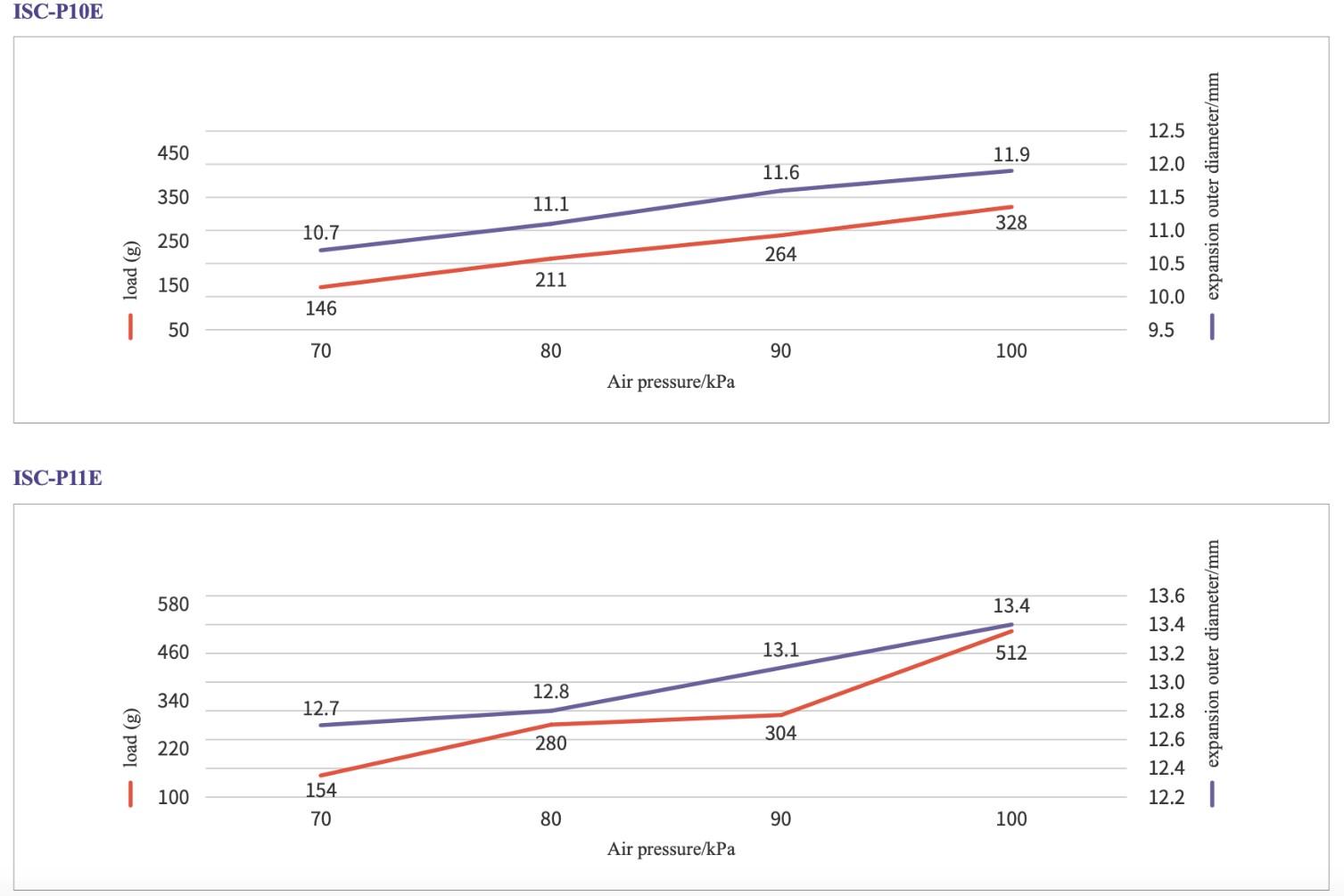
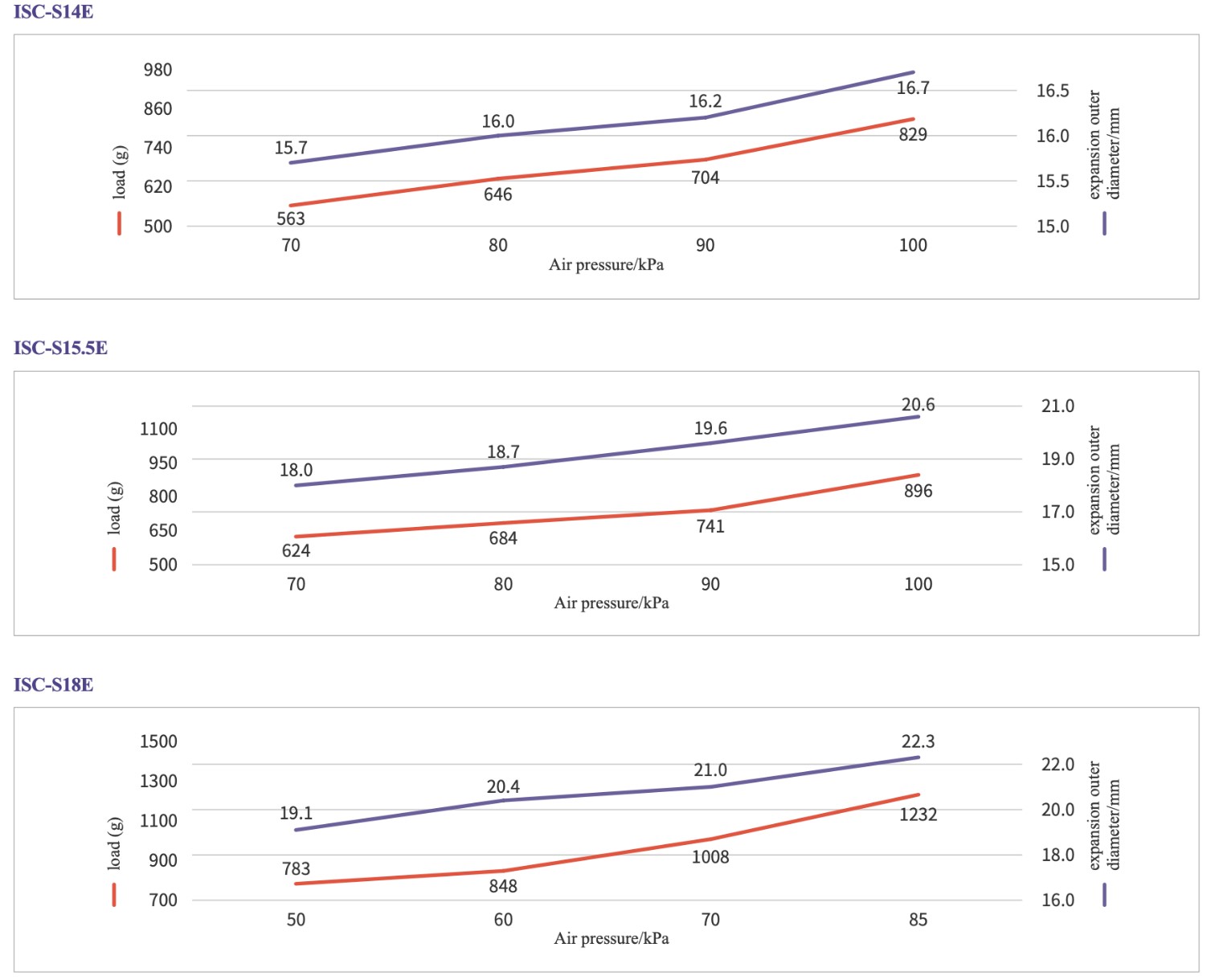
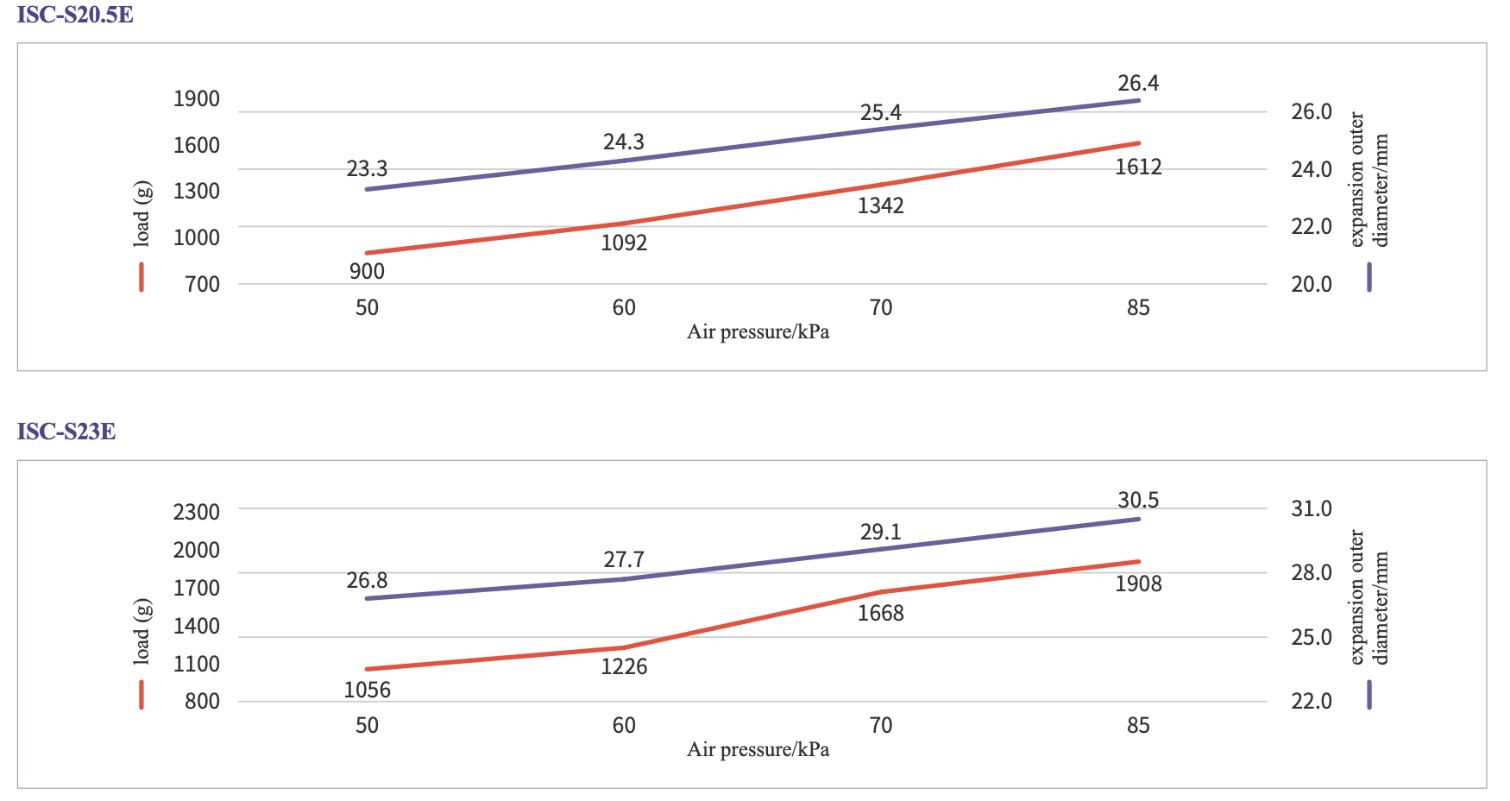
Dijametru ta' barra estiż
| Mudell | Firxa tal-pressjoni operattiva /kPa | Dijametru ta' barra ta' espansjoni massima/mm | Tagħbija massima/g | Piż tal-apparat/g | Mudell ta' virga tal-metall | Dimensjoni tat-toqba tal-immuntar/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30.5 | 1908 | 51 | VFNT 1421-G18 | 14.5 |
* L-oġġett tat-test tat-tagħbija massima tas-serje P huwa d-dijametru ta' barra tal-mudell +0.3mm; L-oġġett tat-test tat-tagħbija massima tas-serje S huwa d-dijametru ta' barra tal-mudell +1mm; It-test tat-tagħbija jitkejjel b'istrumenti professjonali.
In-Negozju Tagħna







