Robot Kooperattiv b'Arma Waħda għall-Ippakkjar u l-Palletizzazzjoni tal-Industrija Kimika, tal-Ikel u tax-Xorb ta' Kuljum Imako


Robot Kooperattiv b'Arma Waħda għall-Ippakkjar u l-Palletizzazzjoni tal-Industrija Kimika, tal-Ikel u tax-Xorb ta' Kuljum Imako
Kategorija Prinċipali
AGV AMR / irfigħ bil-jack up AGV AMR / vettura gwidata awtomatika AGV / robot mobbli awtonomu AMR / karozza AGV AMR għall-immaniġġjar ta' materjali industrijali / manifattur taċ-Ċina robot AGV / maħżen AMR / AMR irfigħ bil-jack up bil-lejżer SLAM navigazzjoni / robot mobbli AGV AMR / xażi AGV AMR lejżer SLAM navigazzjoni / robot loġistiku intelliġenti
Nippreżentaw id-driegħ robotiku rivoluzzjonarju għall-immaniġġjar industrijali ta' palletizzar, ippakkjar f'boroż u kaxxi, soluzzjoni rivoluzzjonarja li se tirrivoluzzjona l-proċessi tal-ippakkjar u l-immaniġġjar tal-industrija. Dan id-driegħ robotiku avvanzat huwa ddisinjat biex jimmassimizza l-effiċjenza u l-produttività filwaqt li jiżgura l-immaniġġjar sikur ta' basktijiet, kaxxi u pakketti.
Hekk kif il-ħtieġa għall-veloċità u l-preċiżjoni tkompli tikber fil-manifattura u l-loġistika, id-dirgħajn robotiċi tagħna għall-immaniġġjar ta' palletizzar industrijali, stivar, ippakkjar ta' boroż u kaxxi huma t-tweġiba aħħarija. Għaddew iż-żminijiet tax-xogħol manwali u r-riskju ta' żball uman. Din id-driegħ robotiku avvanzat hija pprogrammata biex tippalletizza, tistiva u timmaniġġja faċilment kull tip ta' boroż, kaxxi u pakketti, u tipprovdi operazzjonijiet bla xkiel b'ħin ta' waqfien minimu.
Id-driegħ robotiku għall-immaniġġjar għal użu industrijali, palletizzazzjoni, stivar, u ppakkjar ta' basktijiet u kaxxi, għandu sett ta' karatteristiċi mingħajr paragun li jiddistingwuh mill-metodi tradizzjonali. Id-driegħ robotiku huwa mgħammar b'sensuri u teknoloġija avvanzati biex jiżgura moviment preċiż u konsistenti, u jelimina l-possibbiltà ta' tħaddim ħażin jew ħsara lill-prodotti li qed jiġu mmaniġġjati. Il-kapaċitajiet ta' veloċità għolja tiegħu, flimkien mal-abbiltà li jidentifika u jaġġusta b'mod preċiż forom u daqsijiet differenti, iżidu b'mod sinifikanti l-veloċità u l-effiċjenza tal-operazzjonijiet tal-ippakkjar.
Barra minn hekk, dan id-driegħ robotiku huwa versatili immens, u dan jagħmilha adattata għal varjetà ta' industriji. Mill-ipproċessar tal-ikel sal-farmaċewtiċi, mill-magażżinaġġ sal-manifattura, din is-soluzzjoni robotika tista' tadatta bla xkiel għal varjetà ta' ambjenti u kompiti. Kemm jekk timmaniġġja boroż ta' piżijiet differenti, tpoġġi kaxxi fuq xulxin bi preċiżjoni, jew tippakkja prodotti b'attenzjoni, id-dirgħajn robotiċi tagħna għall-immaniġġjar ta' palletizzar industrijali, stivar, u ppakkjar ta' kaxxi huma s-soluzzjoni perfetta.
Fil-qosor, l-Industrial Palletizing Bag Box Packaging Robot Handling Arm huwa rivoluzzjonarju fid-dinja tal-ippakkjar u l-immaniġġjar industrijali. Bil-karatteristiċi avvanzati tiegħu, l-effiċjenza u l-versatilità mingħajr paragun, din is-soluzzjoni rivoluzzjonarja se tfassal mill-ġdid l-industrija billi żżid b'mod sinifikanti l-produttività, tnaqqas l-ispejjeż tax-xogħol u tiżgura s-sikurezza tal-prodott. Ibqa' pass 'il quddiem mill-kompetizzjoni u ħaddan il-futur tal-awtomazzjoni industrijali bid-dirgħajn robotiċi avvanzati tagħna.
Applikazzjoni

Xażi bla ekwipaġġ tas-Serje AMB AMB (Auto Mobile Base) għal vettura awtonoma agv, xażi universali ddisinjata għal vetturi ggwidati awtonomi agv, tipprovdi xi karatteristiċi bħall-editjar tal-mapep u n-navigazzjoni tal-lokalizzazzjoni. Dan ix-xażi bla ekwipaġġ għall-karrettun agv jipprovdi interfaces estensivi bħal I/O u CAN biex jiġu mmuntati diversi moduli ta' fuq flimkien ma' softwer qawwi tal-klijent u sistemi ta' dispaċċ biex jgħinu lill-utenti jlestu malajr il-manifattura u l-applikazzjoni ta' vetturi awtonomi agv. Hemm erba' toqob għall-immuntar fuq nett tax-xażi bla ekwipaġġ tas-serje AMB għal vetturi ggwidati awtonomi agv, li jappoġġja espansjoni arbitrarja b'irfigħ, rombli, manipulaturi, trazzjoni latenti, wiri, eċċ. biex jinkisbu applikazzjonijiet multipli ta' xażi waħda. AMB flimkien ma' SEER Enterprise Enhanced Digitalization jistgħu jirrealizzaw id-dispaċċ u l-iskjerament unifikati ta' mijiet ta' prodotti AMB fl-istess ħin, li jtejjeb ħafna l-livell intelliġenti tal-loġistika u t-trasport intern fil-fabbrika.
Karatteristika
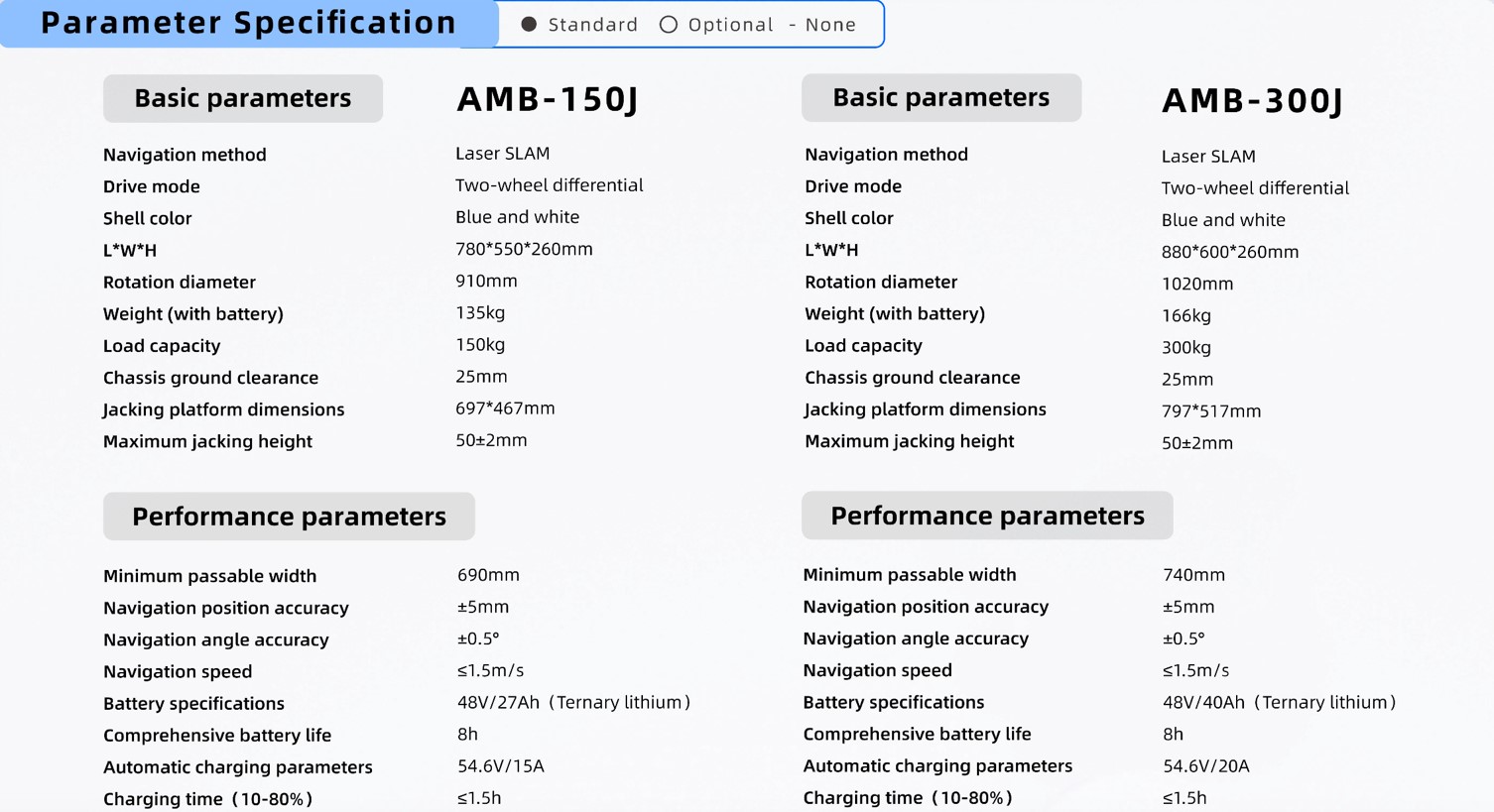
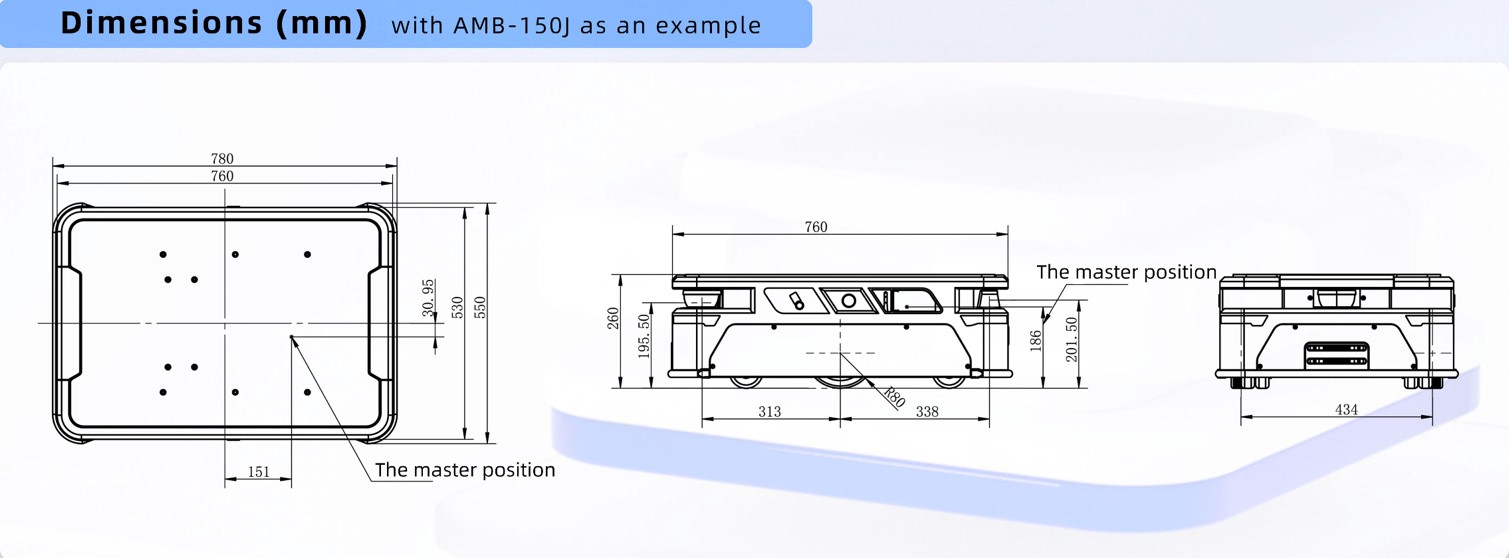
·kapaċità tat-tagħbija: 150kg u 300kg
·għoli massimu tal-irfigħ: 50mm
·preċiżjoni tal-pożizzjoni tan-navigazzjoni: ±5mm
·preċiżjoni tal-angolu tan-navigazzjoni: ±0.5°
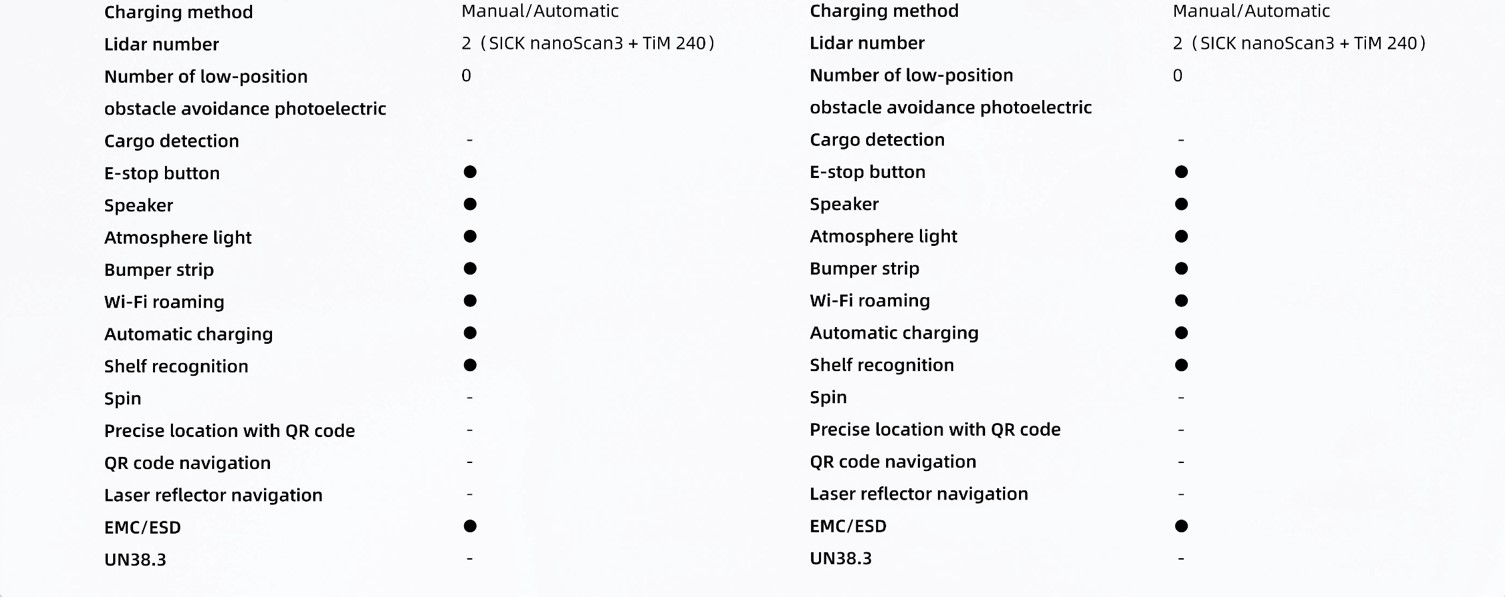
● Karatteristiċi rikki disponibbli fi kwalunkwe ħin
Karatteristiċi standard komprensivi u eċċellenti u karatteristiċi avvanzati rikki u prattiċi jgħinu lill-klijenti jiksbu loġistika intelliġenti faċilment.
● Pjattaformi b'ħafna speċifikazzjonijiet disponibbli għall-espansjoni
Ipprovdi pjattaformi ta' 150kg u 300kg biex tissodisfa r-rekwiżiti tat-tagħbija u x-xena ta' industriji differenti. Jista' jintuża wkoll ma' manipulaturi, rombli, iġbid, trazzjoni latenti, pan/tilt, skrin tal-wiri, eċċ. biex jinkisbu applikazzjonijiet multipli b'xażi waħda.
● ±5 mm, effiċjenti u preċiż
L-algoritmu Laser SLAM jintuża biex jinkiseb lokalizzazzjoni ta' preċiżjoni għolja, bil-preċiżjoni tal-lokalizzazzjoni ripetuta mhux riflettiva tal-lejżer fi ħdan ±5 mm, li tippermetti docking bla xkiel bejn robots mobbli u bnedmin, u fluss effiċjenti ta' tagħbijiet fost diversi punti. Nota: Il-valuri attwali jiddependu fuq il-kundizzjonijiet ambjentali.
● Navigazzjoni stabbli għas-sigurtà u l-affidabbiltà
In-navigazzjoni bil-lejżer SLAM, in-navigazzjoni bir-riflettur tal-lejżer, in-navigazzjoni bil-kodiċi QR u metodi oħra ta' navigazzjoni huma integrati perfettament u jinbidlu bla xkiel biex jiżguraw ix-xogħol stabbli tar-robot mobbli.
● Skjerament faċli u ġestjoni viżibbli
Firxa sħiħa ta' softwer ta' appoġġ u sistemi diġitali jistgħu faċilment jirrealizzaw l-operazzjoni, l-iskedar u l-ġestjoni tal-informazzjoni tar-robots mobbli, u jikkonnettjaw bla xkiel mas-sistema MES tal-fabbrika biex verament jirrealizzaw loġistika intelliġenti.
Prodotti Relatati



Parametru tal-Ispeċifikazzjoni
In-Negozju Tagħna


Kategoriji ta' prodotti
-

Magna Robotika Awtomatika Industrijali taċ-Ċina b'6 Assi...
-
Robot Industrijali Kollaborattiv Intelliġenti 6 Ax...
-

Manipulatur Industrijali b'2 Assi Servo Motor Arm R...
-
Manipulatur ta' 6 Assi bi prezz baxx għall-iwweldjar fiċ-Ċina...
-

Robot Kollaborattiv ta' 6 Assi li Jimmaniġġja Robot b'Idejn...
-

6 Assi Tagħbija ta' 6kg Immaniġġjar Qtugħ Iwweldjar Ind...