Robot Agv tal-Forklift Awtomatiku Elettriku ta' Navigazzjoni bil-Laser Intelliġenti ta' 1000kg


Robot Agv tal-Forklift Awtomatiku Elettriku ta' Navigazzjoni bil-Laser Intelliġenti ta' 1000kg
Kategorija Prinċipali
AGV AMR / vettura gwidata awtomatika AGV / robot mobbli awtonomu AMR / stacker tar-robot AMR / karozza AMR għall-immaniġġjar ta' materjali industrijali / stacker żgħir bil-lejżer SLAM forklift awtomatiku / maħżen AMR / navigazzjoni bil-lejżer SLAM AMR / robot mobbli AGV AMR / xażi bil-lejżer SLAM navigazzjoni / forklift awtonomu bla ekwipaġġ / maħżen AMR stacker tal-pallet
Applikazzjoni

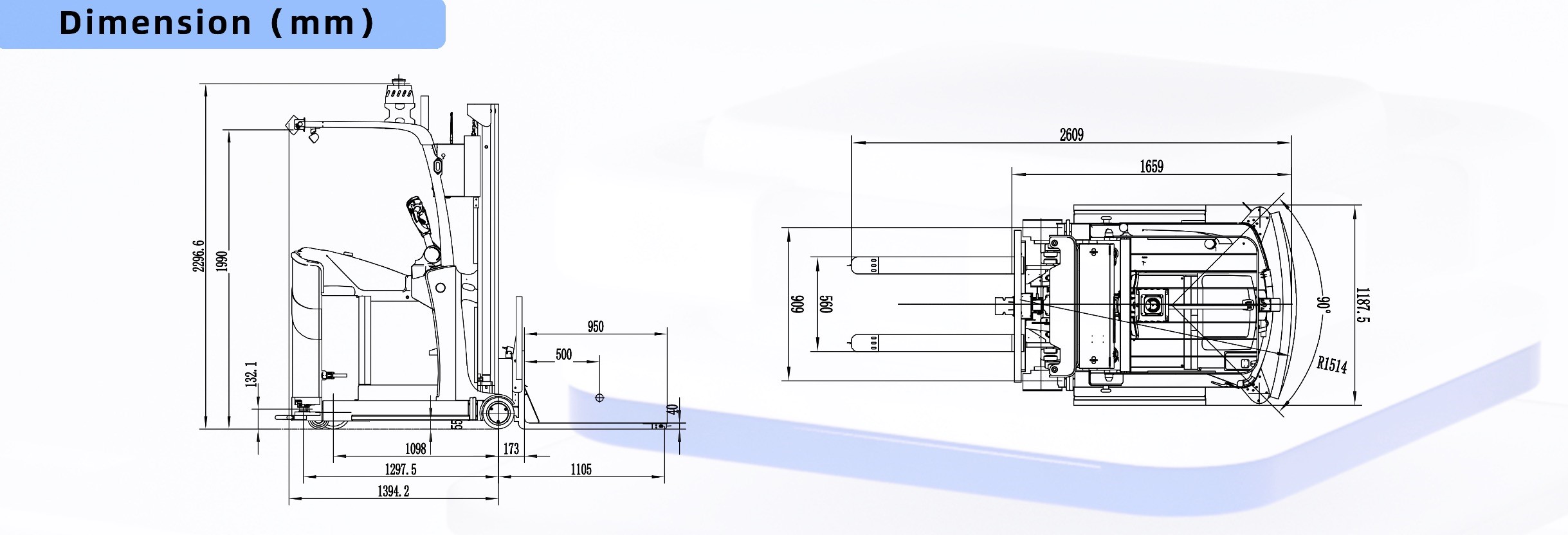
It-Trakk tal-Irfigħ għall-Maħżen SFL-CPD15-T huwa mgħammar b'Kontrollur tas-Serje SRC integrat żviluppat minn SEER. Jista' jintuża faċilment mingħajr rifletturi billi jadotta navigazzjoni Laser SLAM, jiġbor b'mod preċiż permezz ta' sensur tal-identifikazzjoni tal-pallet, u jkun konness bla xkiel mas-sistema tad-dispaċċ. Dan it-trakk tal-forklift awtomatiku għall-maħżen huwa l-magna tal-irfigħ għall-maħżen tat-trasferiment preferuta għall-moviment, l-istivar u l-palletizzazzjoni tal-merkanzija fil-fabbrika.
Nippreżentaw ir-Robot Arm Robot Manual Industrial Six-Axis Collaborative Handling and Palletizing Robot, soluzzjoni avvanzata ddisinjata biex tirrivoluzzjona l-proċessi industrijali manwali. Din id-driegħ robotiku avvanzat ħafna jgħaqqad il-preċiżjoni, il-flessibbiltà u l-effiċjenza biex jottimizza bla xkiel l-operazzjonijiet ta' mmaniġġjar u palletizzazzjoni.
Bid-disinn kollaborattiv tiegħu ta' sitt assi, dan ir-robot tal-immaniġġjar joffri mobilità u adattabilità mingħajr paragun, u b'hekk ikun żieda ideali għal kwalunkwe ambjent industrijali. Kemm jekk taħdem fil-manifattura, fil-loġistika, jew fil-magażinaġġ, dan ir-robot jista' jimmaniġġja varjetà ta' kompiti bil-faċilità, mill-ġbir u t-tqegħid ta' oġġetti sal-palletizzazzjoni ta' oġġetti tqal bi preċiżjoni inkredibbli.
Id-driegħ robotiku huwa mgħammar b'sensuri avvanzati u sistemi ta' kontroll avvanzati biex jiżgura prestazzjoni u sigurtà ottimali f'kull ħin. Karatteristiċi kollaborattivi jippermettu lir-robots jaħdmu flimkien ma' operaturi umani mingħajr ma jikkompromettu saħħithom, jimmassimizzaw il-produttività u jiżguraw ambjent tax-xogħol armonjuż.
Il-kostruzzjoni ta' grad industrijali tar-robot tal-immaniġġjar tiggarantixxi durabilità fit-tul, anke fl-aktar kundizzjonijiet operattivi impenjattivi. Il-mutur qawwi u l-kostruzzjoni mekkanika robusta tiegħu jippermettulu jimmaniġġja tagħbijiet tqal bil-faċilità, u b'hekk inaqqas b'mod sinifikanti r-riskju ta' korrimenti fuq il-post tax-xogħol u jżid l-effiċjenza ġenerali.
Waħda mill-karatteristiċi eċċellenti ta’ dan ir-robot tal-immaniġġjar hija s-sistema intuwittiva ta’ kontroll manwali tiegħu. L-operaturi jistgħu jimmanuvraw ir-robot faċilment bl-użu ta’ interface faċli għall-utent, li tippermetti movimenti u aġġustamenti preċiżi. Din is-sistema ta’ kontroll intuwittiva tiżgura rekwiżiti minimi ta’ taħriġ, li tippermetti lill-operaturi jadattaw malajr għall-operazzjoni tar-robot, u fl-aħħar mill-aħħar tnaqqas il-ħin ta’ waqfien u żżid il-produttività ġenerali.
Barra minn hekk, ir-robot tal-immaniġġjar huwa kompatibbli ma' varjetà ta' end effectors u jista' jiġi integrat faċilment fil-flussi tax-xogħol eżistenti, u b'hekk ikun investiment kosteffettiv. Il-kapaċità tiegħu li jadatta għal kompiti differenti u jaħdem bla xkiel ma' magni oħra ġġib valur innegabbli għal kwalunkwe operazzjoni industrijali.
Kollox ma’ kollox, ir-Robotic Arm Robot Manual Industrial Six-Axis Collaborative Handling and Palletizing Robot huwa soluzzjoni eċċellenti għall-ottimizzazzjoni tal-proċessi industrijali manwali. Bil-preċiżjoni, il-flessibbiltà u l-effiċjenza tiegħu, huwa garantit li jżid il-produttività, is-sigurtà u fl-aħħar mill-aħħar jimmassimizza l-profitti. Iltaqa’ mal-era l-ġdida tal-awtomazzjoni industrijali b’dan id-driegħ robotiku avvanzat.
Karatteristika

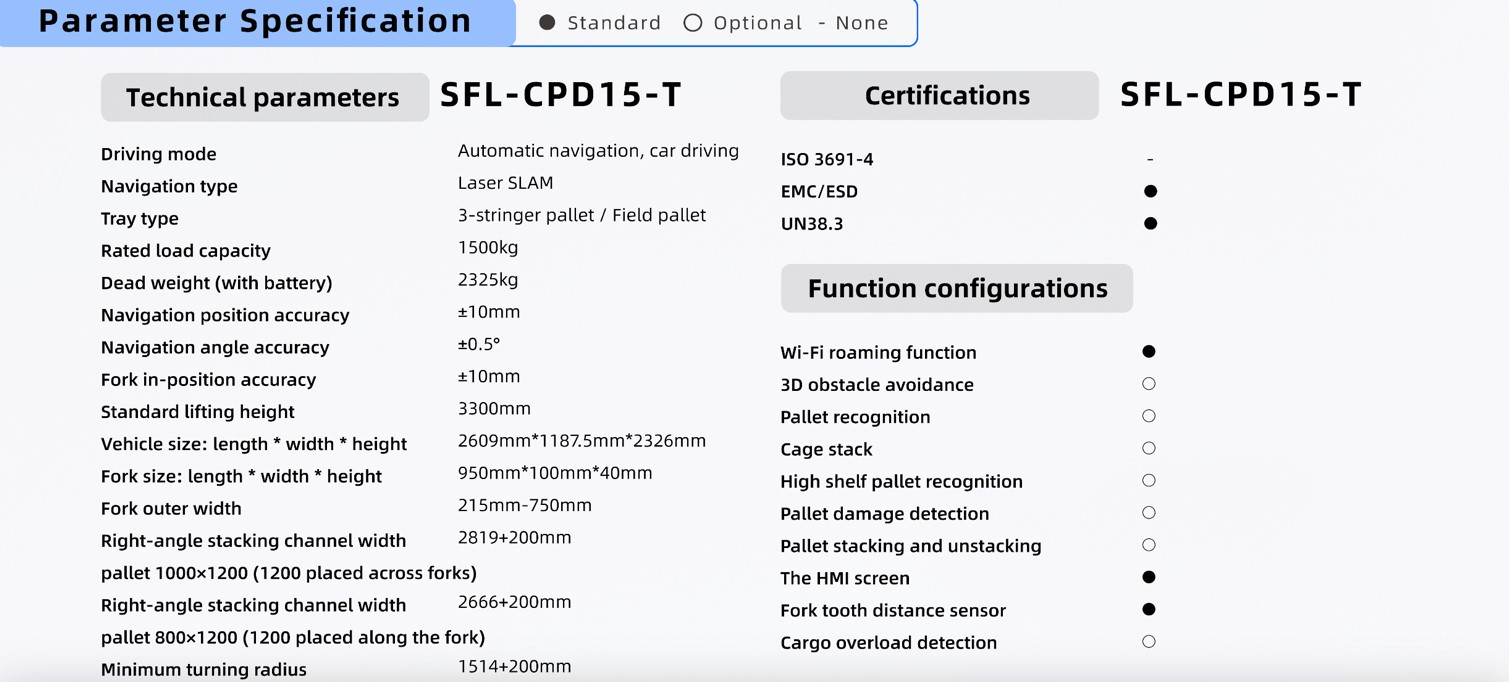
·kapaċità tat-tagħbija nominali: 1500kg
·Preċiżjoni tal-pożizzjoni tan-navigazzjoni: ±10mm
·għoli tal-irfigħ: 3300mm
·raġġ minimu tad-dawrien: 1514 + 200mm
●Navigazzjoni Real Laser SLAM
Navigazzjoni tal-mogħdija mingħajr binarji mingħajr rifletturi tagħmilha tassew konvenjenti biex tiġi implimentata.
●Rikonoxximent ta' preċiżjoni għolja
Identifikazzjoni tal-pallets, identifikazzjoni tal-gaġġa u furkettar preċiż tal-merkanzija – kemm effiċjenti kif ukoll sikur.
●Kapaċità tat-Tagħbija ta' 1.5T
Oġġetti li jġorru tagħbija ta' 1.5T;
Preċiżjoni tar-ripetizzjoni tal-punt: ±10mm u ±0.5°.
●Ċaqliq u Skedar Flessibbli
Disinn irqiq u raġġ żgħir ta' ġirazzjoni għal passaġġi dojoq; skedar flessibbli għal aċċess bla xkiel.
●Protezzjoni sħiħa tagħmilha tassew sigura
Lejżer li jevita l-ostakli, sensur tad-distanza, pjan tal-kamera 3D 360° + protezzjoni tal-ispazju tar-ras, u protezzjoni multidimensjonali.
●Applikabilità Superb
Profiċjenti fit-tixbit, il-qsim tal-ħniek, il-qsim tal-liftijiet, il-ġarr u l-istivar ta' tagħmir.
Prodotti Relatati



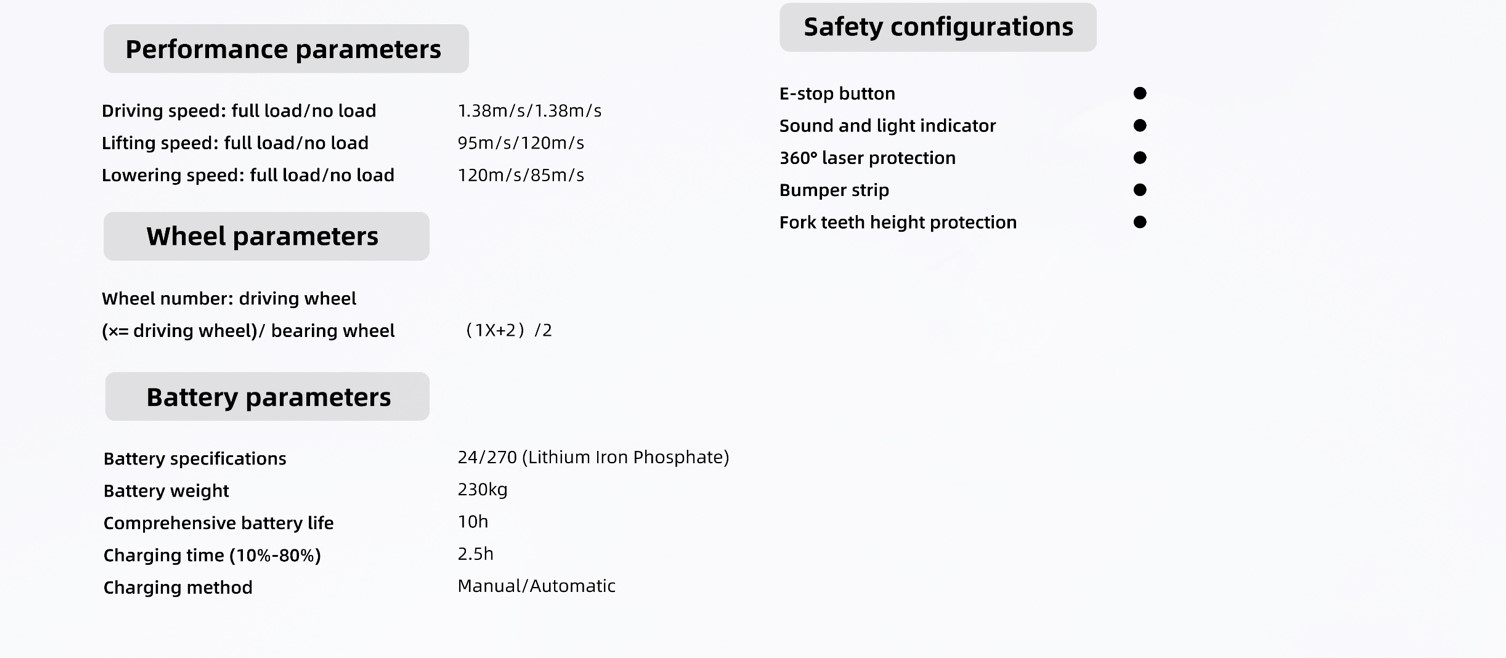
Parametru tal-Ispeċifikazzjoni
In-Negozju Tagħna


Kategoriji ta' prodotti
-

Driegħ Robotiku tal-Iwweldjar b'6 Assi Driegħ Robotiku tal-Industrija b'6 Assi
-

Agv50 Robot Kollaborattiv b'Kapaċità ta' Tagħbija ta' 50kg...
-

Driegħ Robotiku Industrijali Scara Żgħir ta' 4 Assi tad-Desktop...
-

Driegħ Robotiku tal-Isaldjar tal-Awtomata b'Veloċità Għolja 6 Assi...
-
Driegħ Robotiku Industrijali Driegħ Robotiku ta' 6 Assi b'Komp...
-
Iwweldjar Elettriku Huazhongcnc jew Hnc Hsr Żgħir 6...